
Magnetschwebebahn Transrapid
Der Transrapid - eine Hochgeschwindigkeits-Magnetschwebebahn - ist ein in Deutschland u.a. von thyssenkrupp Transrapid entwickeltes, spurgeführtes Verkehrsmittel. Im Gegensatz zur Eisenbahn mit ihrem Rad-Schiene-System schwebt der Transrapid berührungslos entlang seines Fahrwegs. Sowohl das vertikale Tragen als auch das horizontale Führen und der longitudinale Vortrieb sind über elektromagnetische Kräfte realisiert, die eine kontaktlose Bewegung des Fahrzeugs ermöglichen. Das bringt verschiedene Vorteile mit sich, wie zum Beispiel reduzierten Verschleiß und verringerte Geräuschemission, und ermöglicht deutlich höhere Reisegeschwindigkeiten als beim Rad-Schiene-System. Magnetschwebebahnen werden auch als Maglev-Bahnen bezeichnet, was aus dem englischen Begriff für das magnetische Schweben, magnetic levitation, abgeleitet ist.
Zukunftspläne in China

Die aktuell einzige kommerziell betriebene Transrapid-Strecke weltweit verbindet seit 2003 einen Außenbezirk von Shanghai mit dem internationalen Flughafen Pudong auf einer 30 km langen Linie. Dort verkehrt der Transrapid mit einer Höchstgeschwindigkeit von 430 km/h. Seit einigen Jahren verfolgt nun die Regierung der Volksrepublik China das Ziel, eine neue Hochgeschwindigkeits-Magnetschwebebahn mit einer Höchstgeschwindigkeit von 600 km/h zu entwickeln, was sie auch in ihren Fünf-Jahres-Plänen verankert hat. Mit der Entwicklung ist der staatliche Schienenfahrzeughersteller China Railway Rolling Stock Corporation (CRRC) beauftragt. Das Tochterunternehmen CRRC Qingdao Sifang hat bereits den Prototyp eines neuen Maglev-Fahrzeugs präsentiert.
{kind=link}
Forschungstätigkeiten im Bereich Maglev am ITM
Die Forschungstätigkeiten am ITM im Bereich der Magnetschwebebahnen erstrecken sich von der Modellbildung und -validierung über die Entwicklung von fortgeschrittenen Regelungskonzepten bis hin zur Simulation des mechatronischen Gesamtsystems bestehend aus den verschiedenen zuvor entwickelten Teilmodellen. Teilweise geschieht dies in Kooperation mit Partnern aus der Industrie wie thyssenkrupp Transrapid und CRRC Qingdao Sifang. Als Bindeglied fungiert hierbei auch das Chinesisch-Deutsche Forschungs- und Entwicklungszentrum für Bahn- und Verkehrstechnik Stuttgart (CDFEB).
{kind=link}
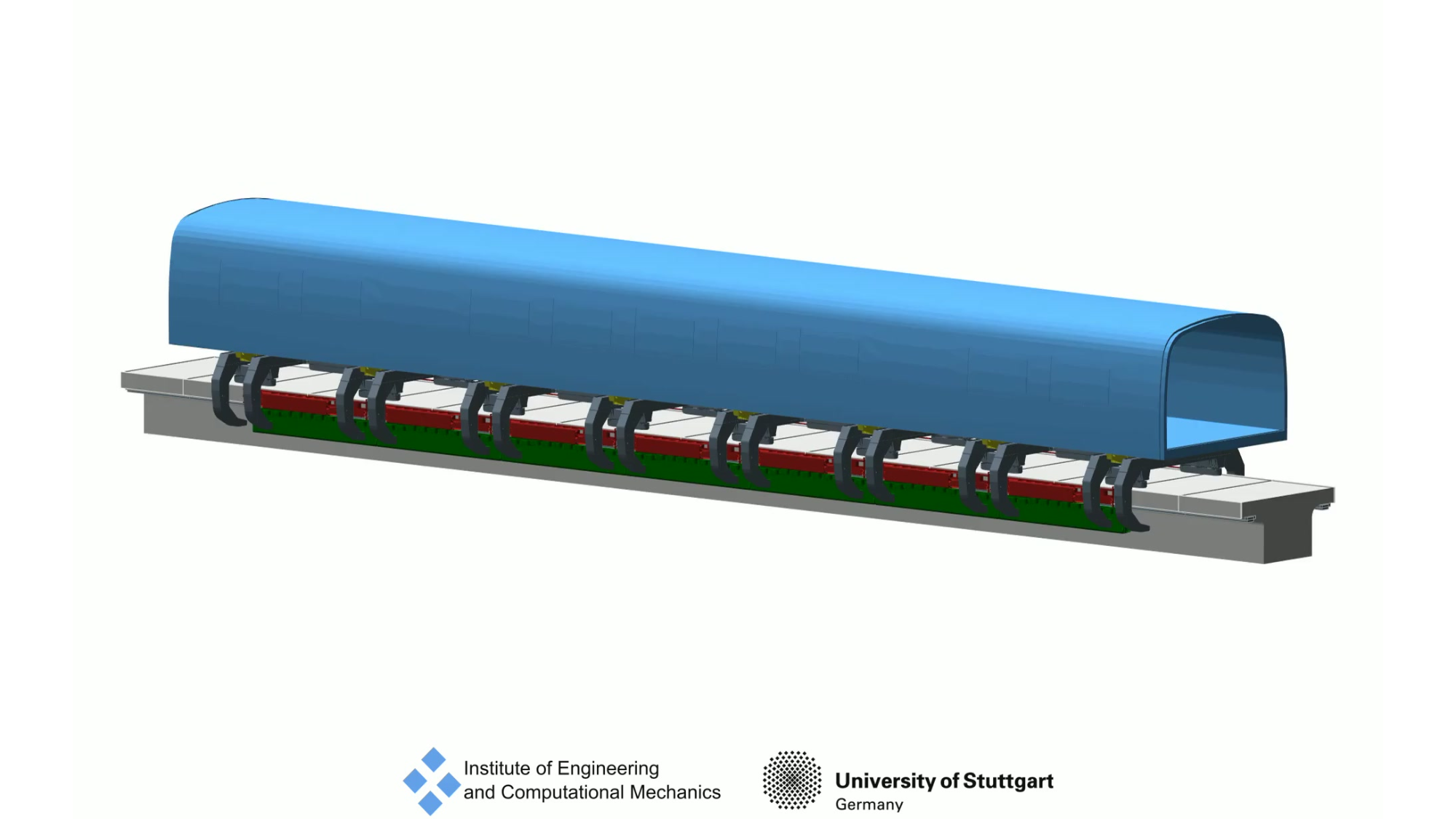
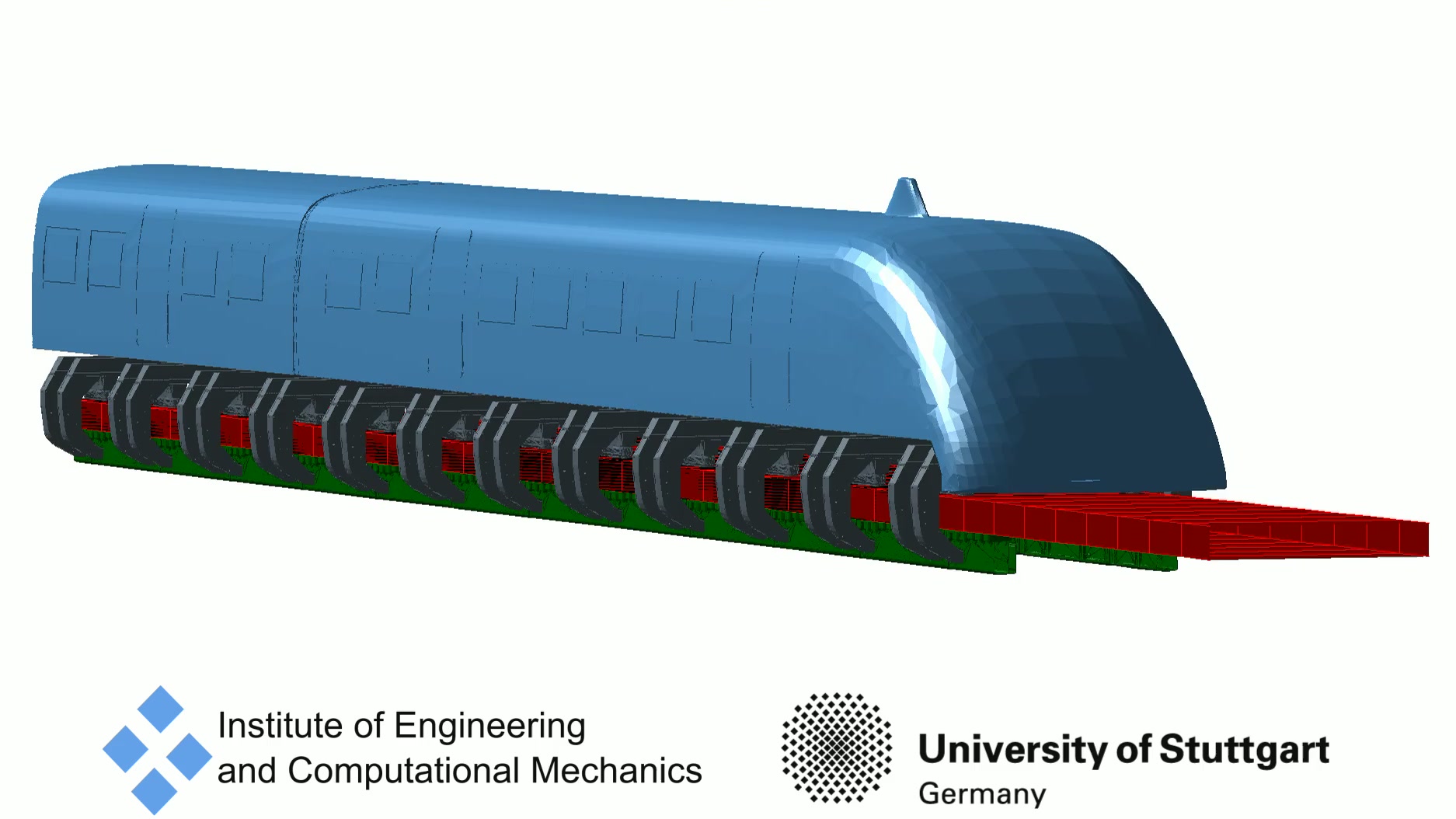
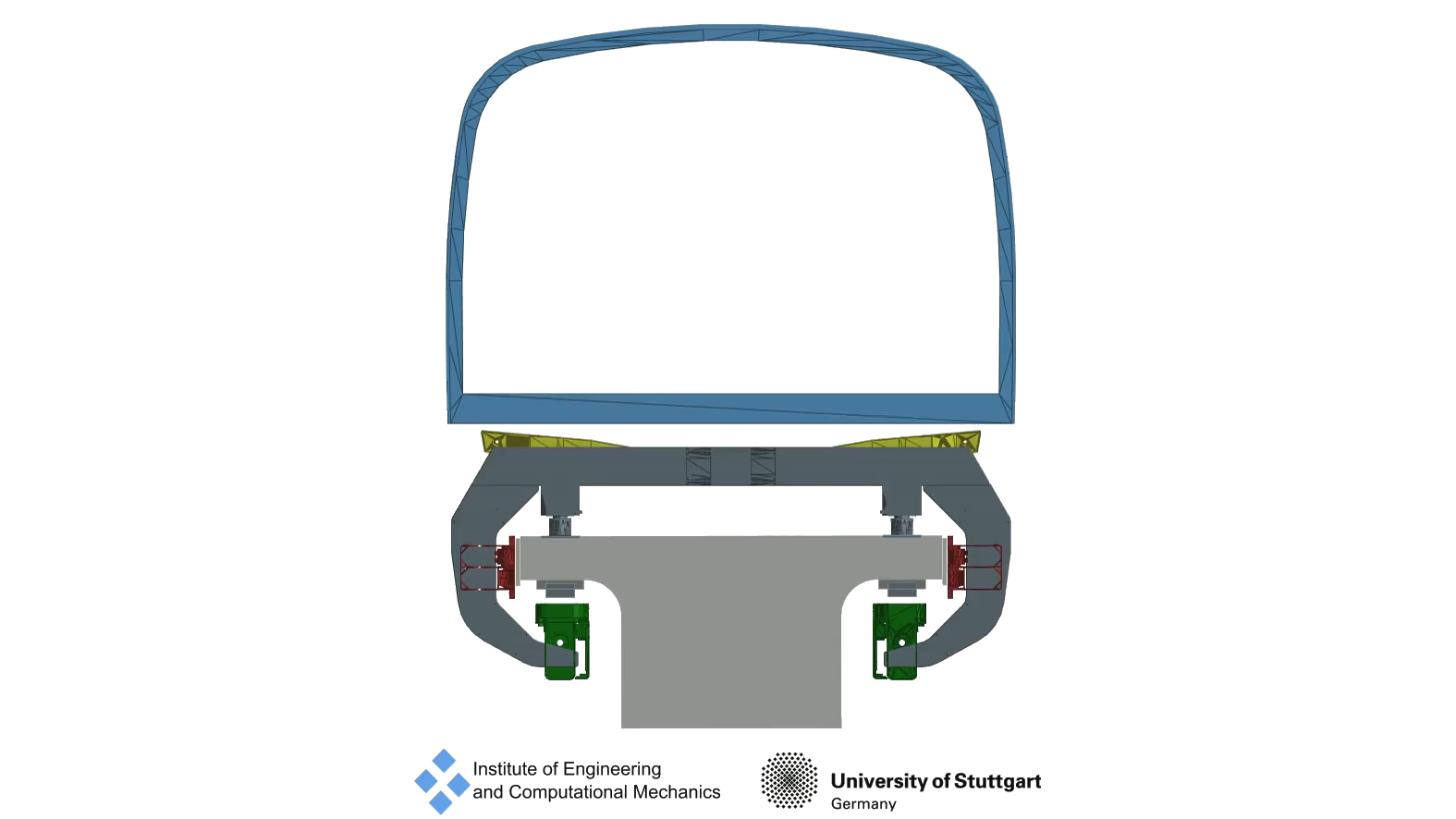
Dreidimensionales Mehrkörpermodell einer Transrapid Mittelsektion erstellt mit der institutseigenen Mehrkörpersimulationssoftware Neweul-M2
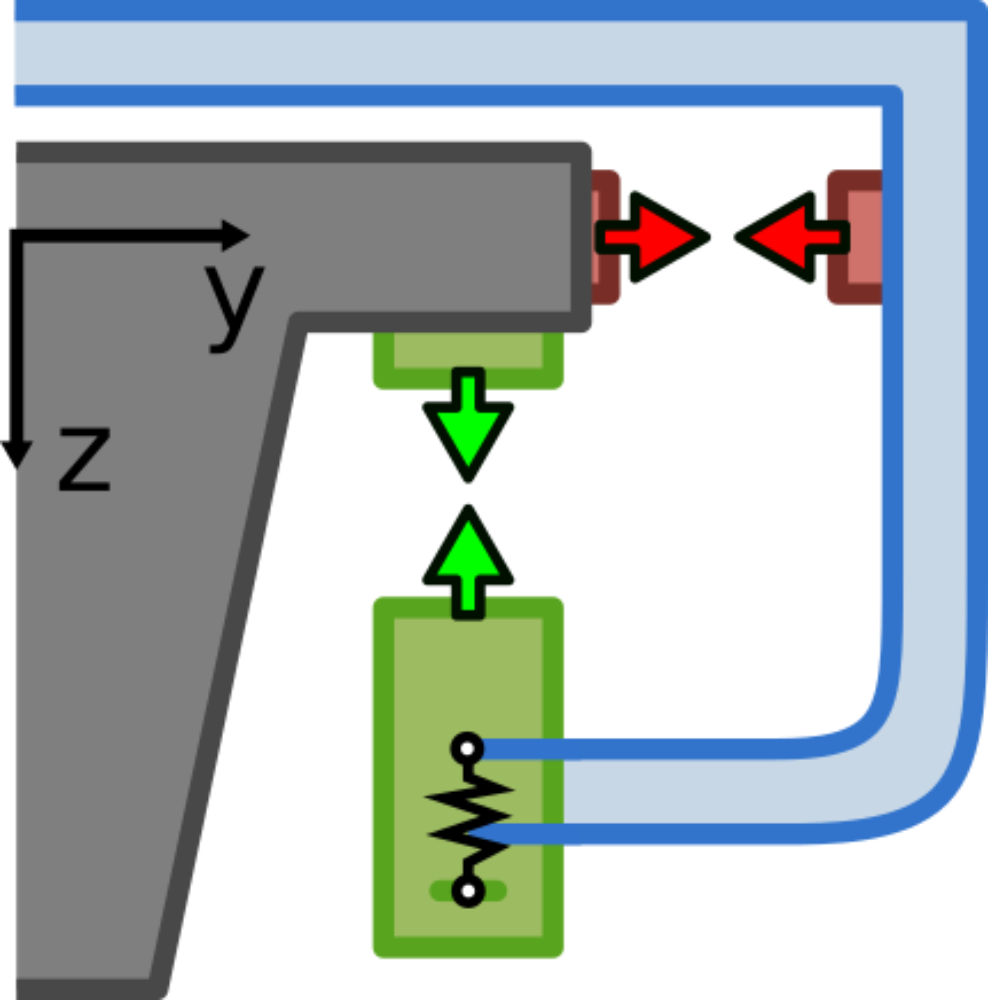
Die Modellbildung umfasst zum einen die mechanische Modellierung des Fahrzeugs und des Fahrwegs als starres und/oder elastisches Mehrkörpermodell, wobei hauptsächlich die Methode der Mehrkörpersysteme zum Einsatz kommt. Die programmtechnische Umsetzung erfolgt mit der institutseigenen Mehrkörpersimulationssoftware Neweul-M2. Zum anderen umfasst die Modellbildung die Abbildung des statischen und dynamischen Verhaltens der Trag- und Führmagnete auf Basis elektrischer und magnetischer Netzwerke. Hierbei werden abhängig von den zu untersuchenden Problemstellungen unterschiedliche Modelle benötigt und entwickelt, die verschiedene Aspekte des jeweiligen Systems abbilden.
{kind=link}
Im Falle des eingesetzten elektromagnetischen Schwebeprinzips muss jeder Trag- und Führmagnet aktiv geregelt werden, um einen Luftspalt zwischen Fahrzeug und Fahrweg sicherstellen zu können. Dem Regelsystem ist hier eine Schlüsselrolle zuzuordnen, da es zum einen den sicheren Betrieb gewährleisten muss und gleichzeitig entscheidend für Fahrdynamik und -komfort ist. Der Forschungsschwerpunkt am ITM liegt auf der Untersuchung der Anwendbarkeit von modellprädiktiven Regelansätzen (MPC, aus dem Englischen model predictive control) zur Regelung der per se instabilen Systemdynamik. Hierbei wird die Stellgröße auf Basis eines wiederkehrenden Optimalsteuerungsproblems bestimmt, indem das zukünftige Systemverhalten auf der Grundlage der zuvor beschriebenen und hergeleiteten mathematischen Modelle prädiziert wird. Dadurch ist es möglich, die nichtlineare Systemdynamik der Elektromagnete sowie die Stellgrößenbeschränkungen unmittelbar im Reglerentwurf zu berücksichtigen. Herausfordernd sind jedoch die echtzeitfähige Lösung des wiederkehrenden Optimierungsproblems, das Ausregeln bleibender Regelabweichungen oder Themen wie Redundanz und Verlässlichkeit der Regelung.
{kind=link}
Kontakt

Peter Eberhard
Prof. Dr.-Ing. Prof. E.h.- Profil-Seite
- +49 711 685 66388
- E-Mail schreiben
- Pfaffenwaldring 9, 70569 D-Stuttgart

Arnim Kargl
M.Sc.