
Maglev Vehicle Transrapid
The Transrapid - a high-speed maglev (from magnetic levitation) vehicle - is a track-bound transport developed in Germany by thyssenkrupp Transrapid and others. Unlike the railway with its wheel-rail system, the Transrapid levitates along its track without contact. Both vertical levitation and horizontal guidance as well as longitudinal propulsion are realized via electromagnetic forces, which allow the vehicle to move without contact. This brings various advantages, such as reduced wear and reduced noise emissions, and allows significantly higher travel speeds compared to the wheel-rail system.
Future Plans in China

Currently the only commercially operated Transrapid line in the world connects an outer district of Shanghai with Pudong International Airport on a 30 km line since 2003. There, the Transrapid operates at a maximum speed of 430 km/h. For several years now, the government of the People's Republic of China pursues the goal of developing a new high-speed maglev train with a top speed of 600 km/h. The project is also included in the country's Five-Year Plans. The state-owned rail vehicle manufacturer China Railway Rolling Stock Corporation (CRRC) is entrusted with the development. Its subsidiary CRRC Qingdao Sifang has already presented the prototype of a new maglev vehicle.
{kind=link}
Research Activities in the Field of Maglev at ITM
The research activities at ITM in the field of maglev vehicles range from model development and validation to the development of advanced control concepts and the simulation of the coupled mechatronic system consisting of the different submodels developed before. In parts, this is done in cooperation with industrial partners like thyssenkrupp Transrapid and CRRC Qingdao Sifang. The Chinese-German Research and Development Centre for Railway and Transportation Technology Stuttgart (CDFEB) also acts as a link here.
{kind=link}
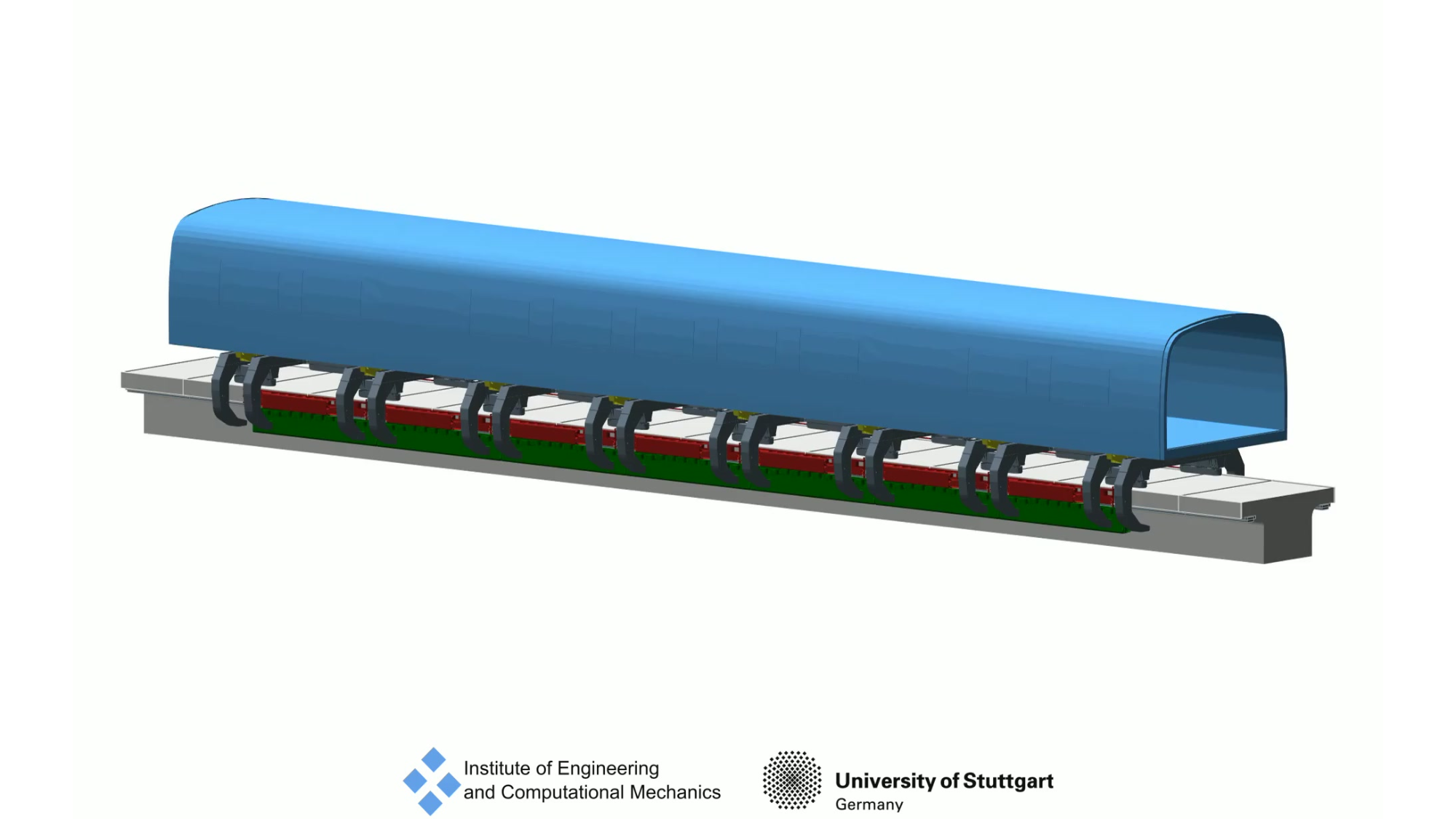
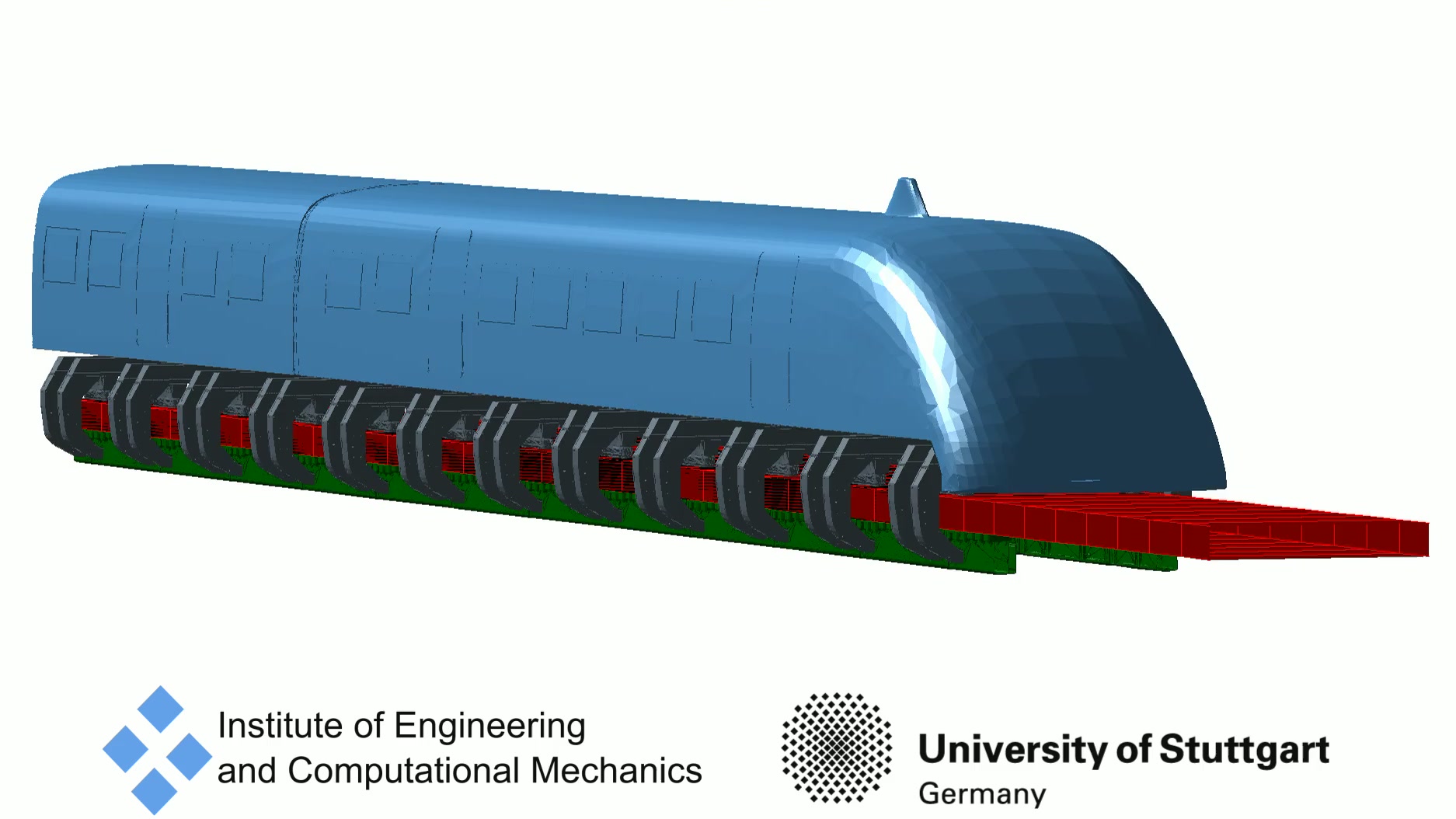
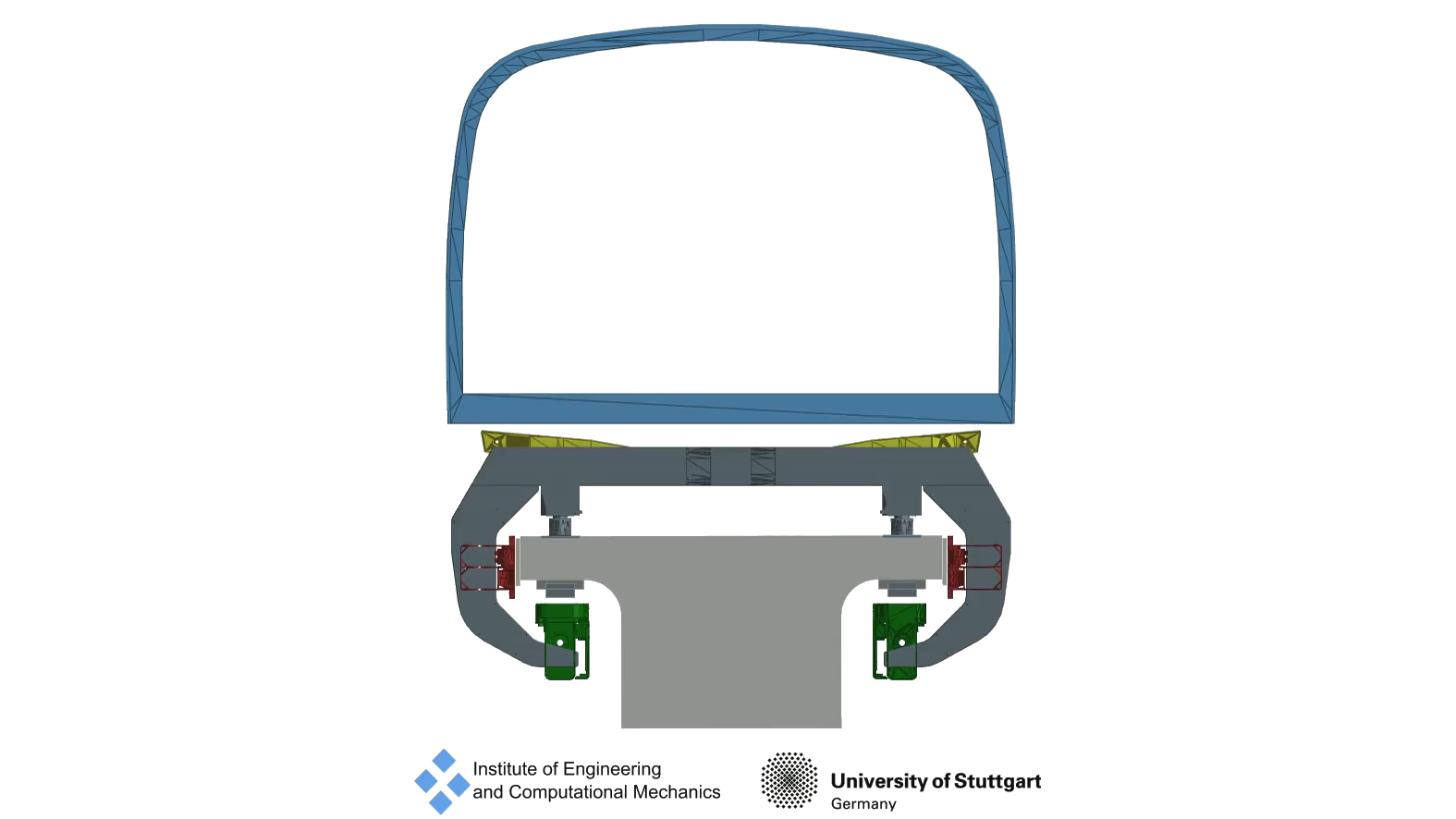
Three-dimensional multibody model of a Transrapid middle section created with the inhouse multibody simulation software Neweul-M2
On the one hand, the modeling includes the mechanical modeling of the vehicle and the guideway as a rigid and/or elastic multibody model, mainly using the method of multibody systems. The programmatic implementation is carried out with the inhouse multibody simulation software Neweul-M2. On the other hand, the modeling includes the representation of the static and dynamic behavior of the levitation and guidance magnets on the basis of electric and magnetic networks. Depending on the problems to be investigated, different models are required and developed to represent different aspects of the respective system.
{kind=link}
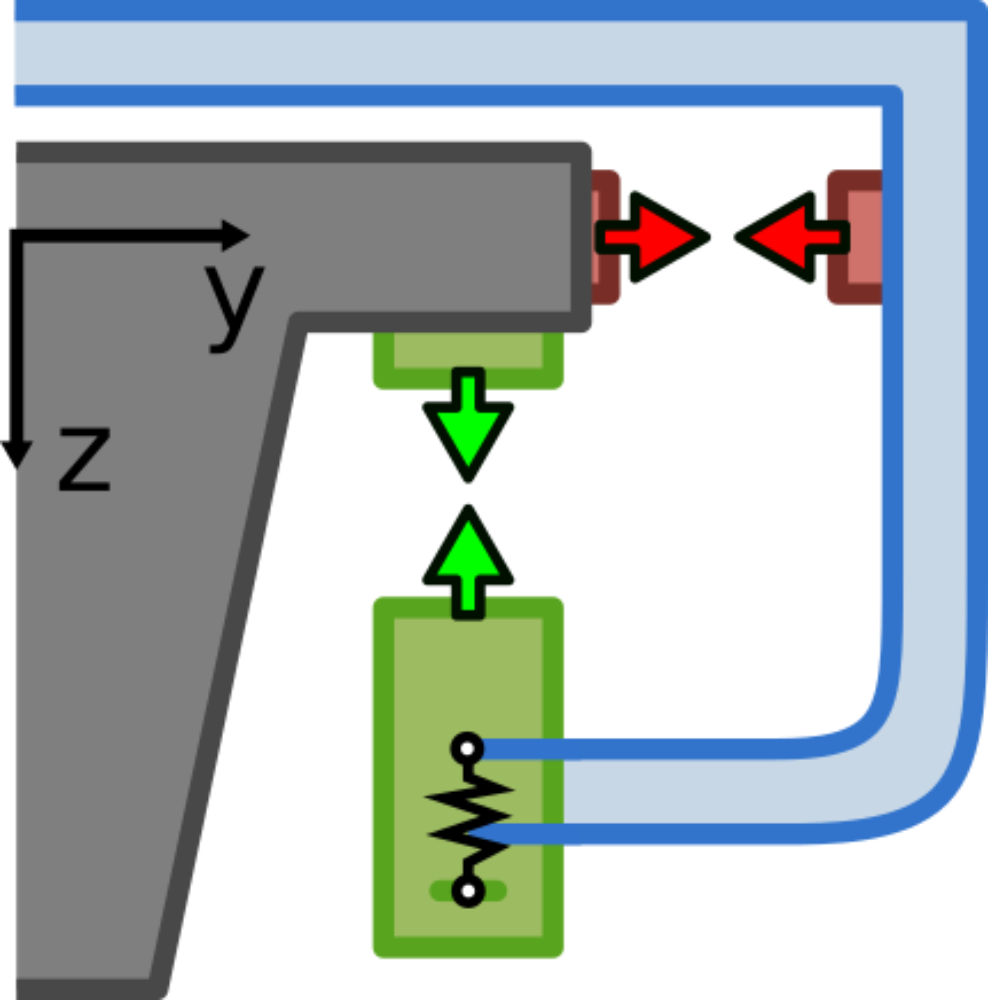
In the case of the electromagnetic suspension principle used for the Transrapid, each levitation and guidance magnet must be actively controlled in order to be able to ensure an air gap between the vehicle and the guideway. The control system plays a key role here, since it must ensure safe operation and at the same time is decisive for driving dynamics and comfort. The research focus at ITM is on the investigation of the applicability of model predictive control (MPC) approaches for the control of the per se unstable system dynamics. Here, the control variable is determined based on a repetitve optimal control problem by predicting the future system behavior based on the previously described and derived mathematical models. This allows the nonlinear system dynamics of the electromagnets as well as the control variable constraints to be directly considered in the controller design. Challenging issues, however, are the real-time solution of the repetitve optimization problem, the compensation of steady-state control offsets or topics like redundancy and dependability of the controller.
{kind=link}
Contact

Peter Eberhard
Prof. Dr.-Ing. Prof. E.h.- Profile page
- +49 711 685 66388
- Write e-mail
- Pfaffenwaldring 9, 70569 D-Stuttgart

Arnim Kargl
M.Sc.