Projektbeschreibung
Das Projekt "Wiederverwendung und Reanalyse von Simulationsdaten in der Strukturdynamik" ist Teil des Cluster of Excellence "Data-Integrated Simulation Science (SimTech)". Innerhalb des Projektnetzwerks 7 "Adaptive Simulation and Interaction" ist es ein Ziel dieses Projekts beschleunigte und verbesserter Ersatzmodelle für komplexe Simulationen anhand früherer Simulationsdaten zu genierieren. Dies umfasst datenbasierte sowie der physik-basierte Surrogatsmodellierung sowie die Kombination von physik und datenbasierten Modellen.
Datenbasierte Surrogatsmodellierung hochdimensionaler Systeme
Komplexe hochdimensionale ("high-fidelity") Simulationsmodelle erfordern potente Hardware und viel Rechenzeit. Sie sind daher ungeeignet für Einsätze in Bereichen mit limitierten Zeit- und Hardwareresourcen, wie sie beispielsweise in mobilen Geräten (Handys, VR-Brillen) zum Einsatz kommen.
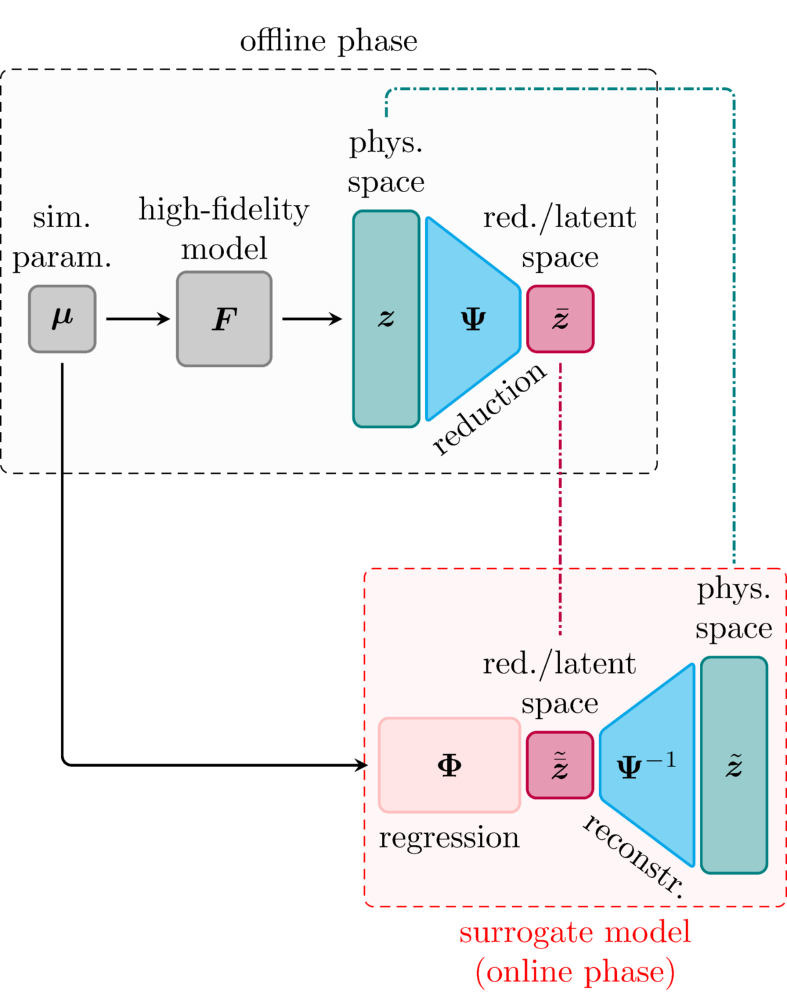
Ziel dieses Projektes ist es daher, anstelle von teuren high-fidelity Simulationsmodellen, effiziente Ersatzmodellen auf der Basis früherer Simulationsergebnisse zu erstellen. Dabei setzen wir auf eine Kombination aus Modellordnungsreduktion (MOR) und maschinellem Lernen (ML) (siehe Abb. 1). Im Gegensatz zu klassischen linearen MOR Methode, kann dieser Ansatz mit Nichtlinearitäten umgehen und erfordert im Gegensatz zu klassischen nichtlinearen Ansätzen keine tiefgreifenden Änderungen am ursprünglichen Simulationscode.
Bei unserem Verfahren werden frühere Simulationsergebnisse, die durch ein High-Fidelity Modell erzeugt wurden, verwendet, um eine niedrigdimensionale Darstellung der Simulationsergebnisse zu finden. Regressionsalgorithmen aus dem Bereich des maschinellen Lernens werden anschließend verwendet, um das Systemverhalten in seiner reduzierten Beschreibung zu approximieren. So kann beispielsweise das Bewegungsverhalten eines innerhalb eines Fahrzeugs beschleunigten Insassen [Kneifl, Hay & Fehr, 2021] (siehe Abb. 2) oder das Verhalten eines menschlichen Armes (siehe Abb. 3) vorhergesagt werden.
Abb. 3 Approximation statischer Positionen eines menschlichen Armes und der dabei auftretenden inneren Spannungen. Je größer die Spannung desto heller ist der entsprechende Bereich gefärbt. (Kooperation mit PN 7-1)
Abb. 2 Insassensimulation in einem Pre-Crash Simulation. Links: Referenzmodell. Rechts: Ersatzmodell eingefärbt in Bezug auf den individuellen Knotenfehler. [Kneifl, Hay & Fehr, 2021]
Abb. 4 Regelung eines Manipulators basierend auf einem physik-informierten modellprädiktiven Regler.
Physik-informierte Surrogatsmodellierung
Im Gegensatz zu komplett datenbasierten Ansätzen, kann es vorteilhaft sein Domänenwissen beispielsweise in Form von physikalischen Gesetzen bei der Ersatzmodellierung zu berücksichtigen.
So kann ein klassische physikalisch abgeleitetes Modell mithilfe eines datenbasierten Modells verbessert werden. Beispielsweise indem der Fehler zwischen einem simplen physikalischen ("low-fidelity") Modell und einem high-fidelity Modell bzw. experimentellen Messungen gelernt werden .
Eine weitere Methodik besteht darin die physikalischen Gesetze direkt zu lernen. Dies ermöglicht unter anderem die Echtzeitlösung komplexer optimaler Regelungsprobleme für einen Robotermanipulator [Nicodemus et al., 2021] oder die Identifikation von Reibungstermen in Bewegungsgleichungen auf Grundlage experimenteller Messungen.
Software
Die entwickelten Methoden und Algorithmen werden in der intern entwickelten Softwarelösung MorMl implementiert. Für die Software existieren bereits Anbindungen an LS-Dyna, Hyperworks und Implementierungen in Matlab und Python.
Literature
2024
- P. Conti u. a., „VENI, VINDy, VICI: a variational reduced-order modeling framework with uncertainty quantification“. 2024.
- J. Kneifl, J. Fehr, S. L. Brunton, und J. N. Kutz, „Multi-Hierarchical Surrogate Learning for Structural Dynamical Crash Simulations Using Graph Convolutional Neural Networks“. 2024. doi: 10.48550/arXiv.2402.09234.
- P. Rodegast, S. Maier, J. Kneifl, und J. Fehr, „On using Machine Learning Algorithms for Motorcycle Collision Detection“. 2024. doi: 10.48550/arXiv.2403.09491.
2023
- J. Kneifl, D. Rosin, O. Avci, O. Röhrle, und J. Fehr, „Low-dimensional data-based surrogate model of a continuum-mechanical musculoskeletal system based on non-intrusive model order reduction“, Archive of Applied Mechanics, Juni 2023, doi: 10.1007/s00419-023-02458-5.
- J. Kneifl und J. Fehr, „Crash Simulations of a Racing Kart’s Structural Frame Colliding against a Rigid Wall“. DaRUS, 2023. doi: 10.18419/DARUS-3789.
- D. Pfeifer, J. Scheid, J. Kneifl, und J. C. Fehr, „An improved development process of production plants using digital twins with extended dynamic behaviour in virtual commissioning and control : Simulation@Operations“, in 93rd Annual Meeting of the International Association of Applied Mathematics and Mechanics (GAMM), in 93rd Annual Meeting of the International Association of Applied Mathematics and Mechanics (GAMM). Wiley, 2023, S. e202300225. doi: 10.1002/pamm.202300225.
2022
- J. Kneifl, J. Hay, und J. Fehr, „Real-time Human Response Prediction Using a Non-intrusive Data-driven Model Reduction Scheme“, IFAC-PapersOnLine, Bd. 55, Nr. 20, Art. Nr. 20, 2022, doi: 10.1016/j.ifacol.2022.09.109.
- J. Nicodemus, J. Kneifl, J. Fehr, und B. Unger, „Physics-informed Neural Networks-based Model Predictive Control for Multi-link Manipulators“, IFAC-PapersOnLine, Bd. 55, Nr. 20, Art. Nr. 20, 2022, doi: 10.1016/j.ifacol.2022.09.117.
2021
- J. Kneifl, D. Grunert, und J. Fehr, „A non-intrusive nonlinear model reduction method for structural dynamical problems based on machine learning“, International Journal for Numerical Methods in Engineering, Apr. 2021, doi: 10.1002/nme.6712.
- J. Kneifl und J. Fehr, „Machine Learning Algorithms for Learning Nonlinear Terms of Reduced Mechanical Models in Explicit Structural Dynamics“, PAMM, Bd. 20, Nr. S1, Art. Nr. S1, März 2021, doi: 10.1002/pamm.202000353.
- Finanzierung
-
Gefördert durch die Deutsche Forschungsgemeinschaft (DFG) im Rahmen der Exzellenzstrategie des Bundes - EXC 2075 - 390740016. Wir danken für die Unterstützung durch das Stuttgarter Zentrum für Simulationswissenschaft (SimTech).
- Projektleiter
- Wissenschaftliche Mitarbeiter
-
Jonas Kneifl, M.Sc. (ITM)
Ansprechpartner

Jörg Fehr
Prof. Dr.-Ing.