Beschreibung
Neweul-M² ist ein Software-Paket für die dynamische Analyse mechanischer Systeme mit Hilfe der Methode der Mehrkörpersysteme. Es umfasst das Aufstellen der symbolischen Bewegungsgleichungen sowie die Simulation und Analyse des dynamischen Verhaltens. Es läuft in Matlab und verwendet die Symbolic Math Toolbox für die symbolischen Berechnungen. Dies bringt zwei große Vorteile. Zum einen kann einfach ein kommerzieller symbolischer Manipulator verwendet werden. Andererseits stehen einem die immensen numerischen Methoden von Matlab zur Verfügung.
Screenshots
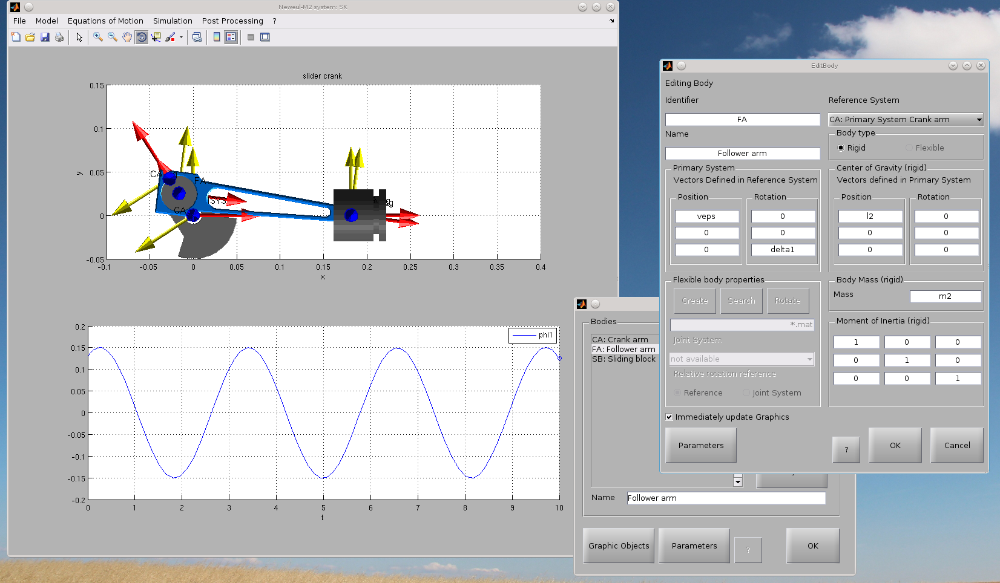
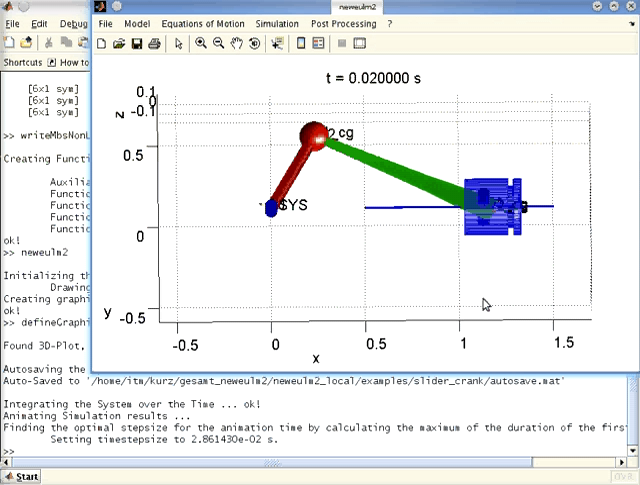
Hier sehen Sie eine Animation eines Mehrkörpersystems, während ein Körper mit der grafischen Oberfläche bearbeitet wird.
Demonstration
{kind=link}
Anleitung
Neweul-M² bietet eine in Matlab integrierte Dokumentation.
Mechanische Mehrkörpersysteme
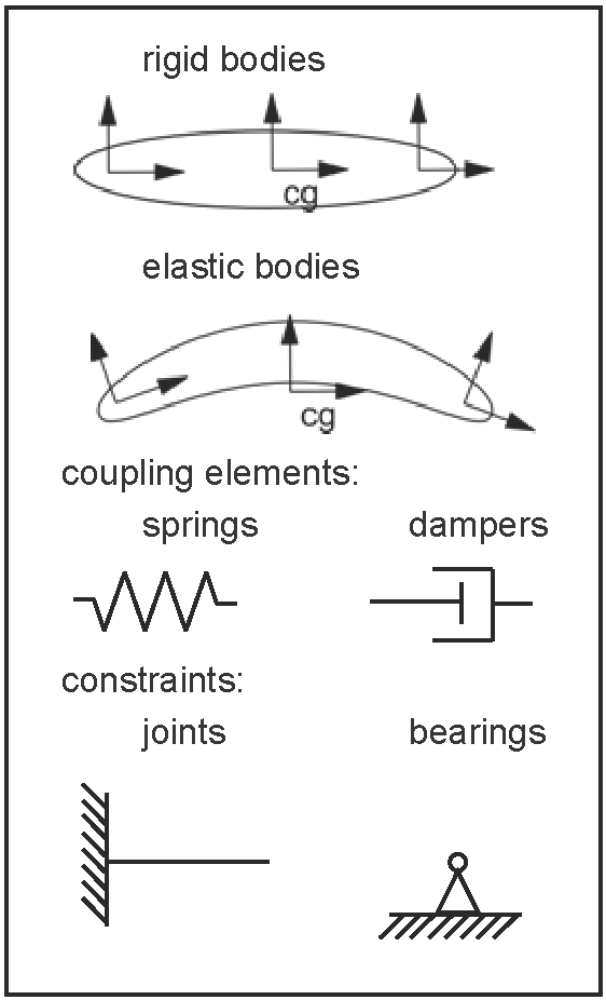
Die dynamische Analyse mechanischer Mehrkörpersysteme beginnt mit dem Modellierungsprozess. Das reale physikalische System wird durch ein idealisiertes Modell approximiert. Mehrkörpersysteme sind mechanische Modelle bestehend aus
- starren und elastischen Körpern,
- beliebigen Bindungselementen (Gelenke, Lager, Lagestellglieder),
- passiven Koppelelementen (Federn, Dämpfer) und
- aktiven Koppelelementen (Servomotoren).
Es gibt keine Einschränkungen für die Topologie des Systems, somit sind mögliche Konfigurationen
- Systeme mit Baumstruktur,
- der Spezialfall Systeme mit Kettenstruktur und
- Systeme mit geschlossenen kinematischen Schleifen.
Im Allgemeinen können die skleronomen oder rheonomen Bindungen entweder holonom oder nicht-holonom sein. Im Moment ist das Programm jedoch auf holonome, sowie sehr einfach nicht-holonome Systeme beschränkt.

Historischer Hintergrund
Am Anfang stand das Software-Paket NEWEUL, welches erfolgreich in unzähligen Projekten und Arbeiten in der Industrie und in der akademischen Forschung seit 1979 eingesetzt wurde. Es wurde in FORTRAN geschrieben und verfügt über einen eigenen symbolischen Formelmanipulator. Im Jahr 2007 wurde dann die Entwicklung dieser neuen Version begonnen. Wie bereits erwähnt ist sie in Matlab geschrieben und verwendet die Symbolic Math Toolbox, um die symbolischen Manipulationen aufzurufen. Aus dieser Kombination des Vorgängers NEWEUL und der Verwendung von Matlab und dessen symbolischer MuPad-Engine ist dann der Name Neweul-M² entstanden. Falls Sie Fragen zum aktuellen Programm oder zur Vorgängerversion NEWEUL haben, finden Sie ganz unten auf dieser Seite Ansprechpartner für Ihre Fragen. Die Dokumentation der alten Version ist hier immer noch verfügbar.
Anwendungen
Das Software Paket NEWEUL und die aktuelle Version Neweul-M² wurden seit 1979 sowohl in der Industrie, als auch in der Forschung erfolgreich in unzähligen Projekten und Arbeiten eingesetzt. Die Haupteinsatzgebiete sind
- Fahrzeugdynamik,
- Satellitendynamik,
- Maschinendynamik,
- Biomechanik,
- Dynamik von Mechanismen.
Neweul-M² Eingaben
Das Software-Paket Neweul-M² bietet zwei Möglichkeiten zur Modellierung von Mehrkörpersystemen, und zwar
- kommandobasiert und
- mit der grafischen Benutzeroberfläche.
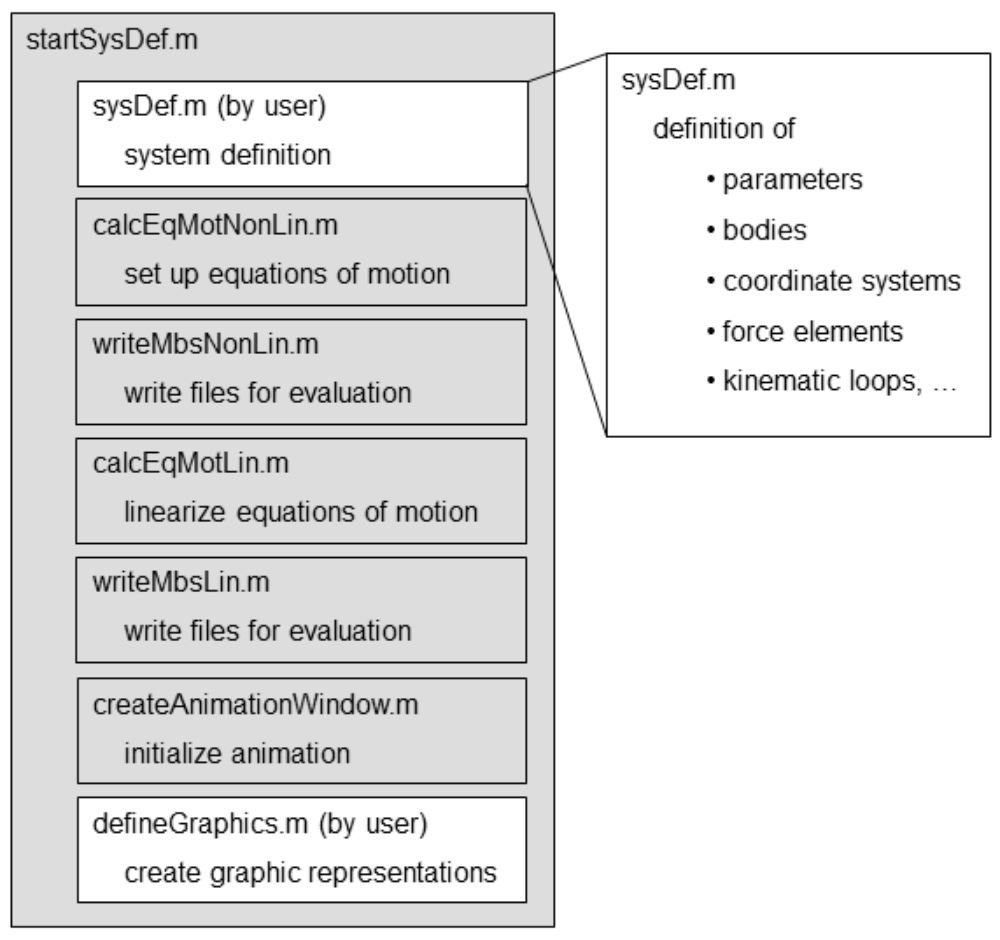
In der kommandobasierten Bedienung werden die Kommandos üblicherweise in Eingabedateien, wie etwa startSysDef.m, zusammengefasst. Sie können aber auch direkt in der Matlab Kommandozeile eingegeben werden. Hierbei gibt der Benutzer lediglich relativ einfache Ausdrücke für die Beziehungen der Relativkinematik und Massenverteilung ein. Eingeprägte Kräfte können entweder direkt oder mit Hilfe von Modellierungselementen, wie z.B. Feder-Dämpfer-Kombinationen, definiert werden. Diese können mit Hilfe von symbolischen Parametern angegeben werden, welche ebenfalls in diesem Schritt festgelegt werden können. Um die Modellerstellung so einfach wie möglich zu halten, sind Beispiele enthalten, so dass der Benutzer lediglich die Befehle entsprechend ändern muss. Bis zu diesem Punkt sind keinerlei numerische Werte notwendig. Sobald diese Werte angegeben sind können für die Modellelemente grafische Objekte als Repräsentation erstellt werden.
Bewegungsgleichungen
Neweul-M² erstellt die Bewegungsgleichungen der Mehrkörpersysteme in symbolischer Form. Dies basiert auf dem Newton-Euler Formalismus mit Hilfe der Prinzipe von d'Alembert und Jourdain.
Nach dem Einlesen der Eingabedaten ist das System vollständig definiert. Anschließend werden mit Hilfe der Matlab Symbolic Toolbox die Bewegungsgleichungen aufgestellt. Die bestehenden Bewegungsgleichungen können anschließend auch linearisiert werden. Nach der symbolischen Berechnung aller Größen werden Dateien in Matlabs m-Format für die numerische Auswertung erstellt. Somit können die symbolischen Ausdrücke jederzeit verändert und erweitert werden. Andererseits bieten die automatisch erstellten Dateien eine schnelle Auswertung der Ausdrücke und können einfach in anderen Programmen außerhalb von Neweul-M² weiter verwendet werden.
C-Export
Die symbolisch vorliegenden Bewegungsgleichungen ermöglichen den automatisierten Export des kompletten Modells, inklusive der definierten Ein- und Ausgänge, zu C. Der kompilierte C-Code kann beispielsweise zur beschleunigten numerischen Auswertung der Bewegungsgleichungen in Matlab verwendet werden. Andererseits können dadurch C-Mex S-Functions und die dazugehörigen Simulink-Blöcke erzeugt werden, die eine effiziente Einbindung des Modells in Simulink ermöglichen. Auch die Kopplung des Modells mit anderen Programmen wie Pasimodo wird dadurch stark vereinfacht. Da der komplette C-Quelltext jederzeit vom Benutzer eingesehen und verändert werden kann, steht der Weiterverwendung des Modells auch außerhalb Matlabs nichts im Wege.
Simulation
Neweul-M² enthält eine große Auswahl an Möglichkeiten für die Simulation, Analyse und Optimierung des Systems. Die wichtigsten Funktionen sind
- numerische Zeitintegration,
- kinematische Analyse,
- Modalanalyse,
- Frequenzgang und Übertragungsfunktion,
- Sensitivitätsanalyse,
- Parameteroptimierung und
- Animation der Ergebnisse.
Da diese Simulationen und Analysen hauptsächlich die zuvor erstellten Dateien für die numerische Auswertung verwenden, können diese auch für beliebige Programme des Benutzers oder Dritter verwendet werden.
- Burkhardt, M.; Seifried, R.; Eberhard, P.: Aspects of Symbolic Formulations in Flexible Multibody Systems.
Journal of Computational and Nonlinear Dynamics, Special Issue on Multibody Dynamics Formulations, J. Cuadrado (ed.), 2013,[doi:10.1115/1.4025897]. - Kurz, T.; Burkhardt, M.; Eberhard, P.: Systems with Constraint Equations in the Symbolic Multibody Simulation Software Neweul-M².
In: Proceedings of the ECCOMAS Thematic Conference Multibody Dynamics 2011, Brussels, Belgium, 2011. - Kurz, T; Eberhard, P.: Flexible Bodies in Symbolic Multibody Systems with Neweul-M².
In: Proceedings of the EUROMECH Colloquium 515, Blagoevgrad, Bulgarien, 2010. - Kurz, T.; Eberhard, P.; Henninger, C.; Schiehlen, W.: From Neweul to Neweul-M²: Symbolical Equations of Motion for Multibody System Analysis and Synthesis,
Multibody System Dynamics, Vol. 24, No. 1, pp. 25-41, 2010. [doi:10.1007/s11044-010-9187-x]. - Kurz, T.; Eberhard, P.: Symbolic modeling and analysis of elastic multibody systems.
In: Proceedings of International Symposium on Coupled Methods in Numerical Dynamics, Split, 2009
- Haug, J.; Piram, U.; Schiehlen, W.; Schirle, T.: Modelling of a Passenger Coach as Elastic Multibody System. In: Proceedings of the 1997 ASME Design Engineering Technical Conferences, Ravani, B. (ed.) 1997.
- Schiehlen, W.: Multibody System Dynamics: Roots and Perspectives. Multibody Sys. Dyn. 1 (1997) S. 149-188.
- Eberhard, P.: Zur Mehrkriterienoptimierung von Mehrkörpersystemen. Düsseldorf: VDI-Verlag, Fortschr.-Ber. Reihe 11, Nr. 227, 1996.
- Bestle, D.: Analyse und Optimierung von Mehrkörpersystemen. Berlin: Springer-Verlag, 1994.
- Schiehlen, W.: Symbolic Computations in Multibody Systems. In: Computer-Aided Analysis of Rigid und Flexible Mechanical Systems, M. F. O. S. Pereira and J. A. C. Ambrosio (eds.). Dordrecht: Kluwer Academic Publishers 1994, S. 101-136.
- Schirm, W.: Symbolisch-numerische Behandlung von kinematischen Schleifen in Mehrkörpersystemen. Düsseldorf: VDI-Verlag, Fortschr.-Ber. Reihe 11, Nr. 198, 1993.
- Leister, G.: Beschreibung und Simulation von Mehrkörpersystemen mit geschlossenen kinematischen Schleifen. Düsseldorf: VDI-Verlag, Fortschr.-Ber. Reihe 11, Nr. 167, 1992.
- Schiehlen, W. (ed.): Multibody Systems Handbook. Berlin: Springer-Verlag, 1990.
- Schmoll, K.-P.: Modularer Aufbau von Mehrkörpersystemen unter Verwendung der Relativkinematik. Düsseldorf: VDI-Verlag, Fortschr.-Ber. VDI-Z, Reihe 18, Nr. 57, 1988.
- Zamow, J.; Witte, L.: Fahrsimulation unter Verwendung des Starrkörperprogrammes ADAMS. VDI-Berichte Nr. 699, 1988, S. 287-309.
- Schiehlen, W.; Eberhard, P.: Applied Dynamics. Cham: Springer, 2014.
- Rill, G.; Klinkner, W.; Schwarz, K.: Nichtlineare Vertikaldynamik von Fahrzeugen - Vergleich zwischen Messung und Rechnung. In: Berechnung im Automobilbau, VDI-Bericht Nr. 537, 1984, S.191-213.
- Schiehlen. W.O.: Computer Generation of Equations of Motion. In: Computer Aided Design and Optimization of Mechanical System Dynamics, E.J. Haug (ed.) Berlin: Springer-Verl. 1984, S.183-215.
- Becker, P.-J.; Jacubasch, A.; Kuntze, H.-B.: Möglichkeiten und Grenzen rechnergestützter Verfahren bei der Entwicklung fortgeschrittener Regelsysteme für Industrieroboter. Langen, Aussprachetag: Rechnergestützter Regelkreisentwurf, 1983, S. 131-149.
- Kreuzer, E.: Symbolische Berechnung der Bewegungsgleichungen von Mehrkörpersystemen. Düsseldorf: VDI-Verlag, Fortschr.-Ber. VDI-Z, Reihe 11, Nr. 32, 1979.
- Schiehlen. W.; Kreuzer, E.: Rechnergestütztes Aufstellen der Bewegungsgleichungen gewöhnlicher Mehrkörpersysteme. Ing-Arch. 46 (1977) S. 185-195.
Das Software-Paket Neweul-M² ist in Matlab implementiert. Es ist Matlab mit einer Symbolic Math Toolbox notwendig. Für die grundlegenden Funktionen sind keine weiteren Vorraussetzungen zu erfüllen. Für manche Anwendungen, wie z.B. Optimierungen, können jedoch weitere Toolboxen notwendig sein. Da der Benutzer sich ausschließlich in der Matlab Umgebung befindet, muss die Hardware in der Lage sein, Matlab auszuführen. Weitere Restriktionen sind bisher nicht bekannt. Das Programm wird regelmäßig unter Linux und Windows sowie mit verschiedenen Matlab-Versionen getestet.
Die Simulationsumgebung Neweul-M² ist als komprimierte Archivdatei, mit einigen Beispielen und einer Bedienungsanleitung, verfügbar.
- Institut für Mathematik, Technische Universität Berlin
- Institut für Numerische und Angewandte Mathematik, Universität Göttingen
- Institut für Statik und Dynamik, Leibniz Universität Hannover
- Lehrstuhl für Numerische Mechanik, Universität Siegen
- Lehrstuhl für Dynamische Systeme in der Fahrzeugtechnik, Universität Siegen
- Institut für Systemdynamik, Universität Stuttgart
- Institut für Regelungstechnik, Technische Universität Hamburg-Harburg
- Clemson University, Clemson, SC, USA
- Institut für Angewandte Systemdynamik (IAS), Hochschule Aalen
- Labor für Rehabilitationswissenschaften, ETH Zürich, Schweiz
- Institut für Verarbeitungs- und Mobile Arbeitsmaschinen, IVMA, Technische Universität Dresden
- ESA, European Space Technology Centre, Noordwijk, Niederlande
- Institut für Verbrennungsmotoren und Kraftfahrwesen, IVK, Universität Stuttgart
- Institut für Mechanik und Meerestechnik, Technische Universität Hamburg-Harburg
- ThyssenKrupp Transrapid GmbH
- Max-Planck-Institut für Dynamik komplexer technischer Systeme, Magdeburg
- Toyohashi University of Technology, Japan
- School of Life Science and Technology, Tongji University, Shanghai, China
- TRUMPF GmbH + Co. KG
- Institut für Robotik und Intelligente Systeme, ETH Zürich, Schweiz
- TRW Automotive
- Daimler AG
- Universitätsklinikum Heidelberg
- Institut für Produktionstechnik, Karlsruher Institut für Technologie
- Vehicle-Infrastructure-Driver Interaction Laboratory, LIVIC, Versailles, Frankreich
- Theoretical Mechanics Dept., Moscow Aviation Institute, Russland
- Dept. of Statistics, University of Johannesburg, Südafrika
- University Dunarea de Jos, Galati, Rumänien
- IRS, Institut für Raumfahrtsysteme, Universität Stuttgart
- Hochschule Heilbronn
- University of Vigo, Spanien
- University of Delaware, USA
- Carl Zeiss SMT AG
- JÖRN GmbH
- Institut für Mechanik, Technische Universität Berlin
- CRRC Corporation Limited
- Indian Institute of Technology, Dehli, Indien
- King Mongkut's University of Technology Thonburi, Thailand
- Laboratory of Robotics and Multibody System, Tongji University, Shanghai, China
- Virtual Automation Lab, Hochschule Esslingen
Durch das symbolische Aufstellen der Bewegungsgleichungen und seine strukturierte Bedienung eignet sich Neweul-M2 sehr gut für die Anwendung in der Lehre. Ein Lehrvideo der Hochschule Heilbronn zeigt die grundlegenden Schritte von der Modellierung über die symbolische Berechnung der Bewegungsgleichungen bis hin zur Animation der Bewegung eines dynamischen Mehrkörpersystems.
{kind=link}
{kind=link}
Sie können bei Fragen gerne einfach eine E-Mail schreiben, dann erreichen Sie immer automatisch den aktuellen Ansprechpartner.
Ansprechpartner
Arnim Kargl
M.Sc.
Peter Eberhard
Prof. Dr.-Ing. Prof. E.h.- Profil-Seite
- +49 711 685 66388
- E-Mail schreiben
- Pfaffenwaldring 9, 70569 D-Stuttgart