Project Description
The project "Reuse and Reanalysis of Simulation Data in Structural Dynamics" is part of the Cluster of Excellence "Data-Integrated Simulation Science (SimTech)". It is placed within the projekt network 7 "Adaptive Simulation and Interaction" and aims to generate accelerated and improved surrogate models for complex simulations using previous simulation data. This includes data-based and physics-informed surrogate modeling as well as merging of physics- and data-based models.
Data-based Surrogate Modeling of High-dimensional Systems
Complex high-dimensional ("high-fidelity") simulation models require dedicated hardware and a considerable amount of computing time. They are therefore unsuitable for applications under time and resource constraints, as found in mobile devices (cell phones, virtual reality headsets).
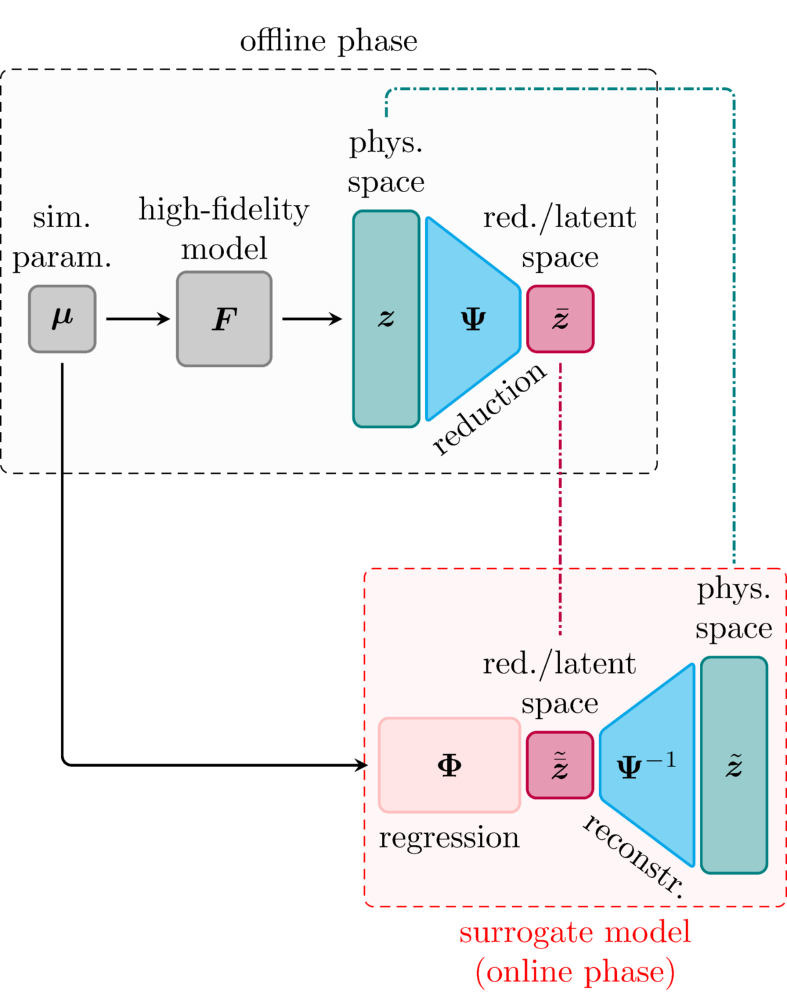
Hence, the goal of this project is to create efficient surrogate models based on previous simulation results instead of expensive high-fidelity simulation models. We rely on a combination of model order reduction (MOR) and machine learning (ML) (see Fig. 1). Unlike classical linear MOR method, this approach can handle nonlinearities and, unlike classical nonlinear approaches, it does not require manipulations to the original simulation code.
In our method, previous simulation results generated by a high-fidelity model are used to find a low-dimensional representation of the simulation results. Regression algorithms from the field of machine learning are then used to approximate the system behavior in its reduced description.
As an example, the motion behavior of an occupant accelerating inside a vehicle [Kneifl, Hay & Fehr, 2021] is shown in Fig. 2 and the approximated behavior of a human arm in Fig. 3.
{kind=link}
Fig. 3 Approximation of static postures of a human arm and the resulting internal stresses. The greater the stress, the lighter the color of the corresponding area. (Cooperation with PN 7-1)
Physics-informed Surrogate Modeling
In contrast to completely data-based approaches, it can be beneficial to consider domain knowledge, for example in the form of physical laws, in the surrogate modeling process.
Thus, a classical physically derived model can be enhanced with the help of a data-based one. For example, by learning the error between a simple physical ("low-fidelity") model and a high-fidelity model or experimental measurements.
Another methodology is to learn the physical laws directly. This allows, among other things, the real-time solution of complex optimal control problems for a robot manipulator [Nicodemus et al., 2021] or the identification of friction terms in equations of motion based on experimental measurements.
Software
The developed methods and algorithms are implemented in the in-house developed software solution MorMl.
Connections to LS-Dyna, Hyperworks and implementations in Matlab and Python already exist for the software.
Literature
2025
- G. H. Mike Huynh, N. Fahse, J. Kneifl, J. Linn, and J. Fehr, “Multi-Fidelity Surrogate Model for Representing Hierarchical and Conflicting Databases to Approximate Human-Seat Interaction,” IFAC-PapersOnLine, vol. 59, Art. no. 1, 2025, doi: 10.1016/j.ifacol.2025.03.058.
2024
- A. Strauß, J. Kneifl, A. Tkachuk, J. Fehr, and M. Bischoff, “Accelerated Non‐linear Stability Analysis Based on Predictions From Data‐Based Surrogate Models,” International Journal for Numerical Methods in Engineering, vol. 126, Art. no. 1, Dec. 2024, doi: 10.1002/nme.7649.
- J. Kneifl, J. Fehr, S. L. Brunton, and J. N. Kutz, “Multi-hierarchical surrogate learning for explicit structural dynamical systems using graph convolutional neural networks,” Computational Mechanics, Oct. 2024, doi: 10.1007/s00466-024-02553-6.
- P. Rodegast, S. Maier, J. Kneifl, and J. Fehr, “On using machine learning algorithms for motorcycle collision detection,” Discover Applied Sciences, vol. 6, Art. no. 6, Jun. 2024, doi: 10.1007/s42452-024-06014-w.
- P. Conti et al., “VENI, VINDy, VICI: a variational reduced-order modeling framework with uncertainty quantification.” 2024. doi: 10.48550/arXiv.2405.20905.
- J. Rettberg, J. Kneifl, J. Herb, P. Buchfink, J. Fehr, and B. Haasdonk, “Data-driven identification of latent port-Hamiltonian systems.” 2024. doi: https://doi.org/10.48550/arXiv.2408.08185.
2023
- J. Kneifl, D. Rosin, O. Avci, O. Röhrle, and J. Fehr, “Low-dimensional data-based surrogate model of a continuum-mechanical musculoskeletal system based on non-intrusive model order reduction,” Archive of Applied Mechanics, Jun. 2023, doi: 10.1007/s00419-023-02458-5.
- D. Pfeifer, J. Scheid, J. Kneifl, and J. Fehr, “An improved development process of production plants using digital twins with extended dynamic behaviour in virtual commissioning and control – Simulation@Operations,” Proceedings in Applied Mathematics & Mechanics, 2023, doi: 10.1002/pamm.202300225.
2022
- J. Kneifl, J. Hay, and J. Fehr, “Real-time Human Response Prediction Using a Non-intrusive Data-driven Model Reduction Scheme,” IFAC-PapersOnLine, vol. 55, Art. no. 20, 2022, doi: 10.1016/j.ifacol.2022.09.109.
- J. Nicodemus, J. Kneifl, J. Fehr, and B. Unger, “Physics-informed Neural Networks-based Model Predictive Control for Multi-link Manipulators,” IFAC-PapersOnLine, vol. 55, Art. no. 20, 2022, doi: 10.1016/j.ifacol.2022.09.117.
2021
- J. Kneifl, D. Grunert, and J. Fehr, “A non-intrusive nonlinear model reduction method for structural dynamical problems based on machine learning,” International Journal for Numerical Methods in Engineering, Apr. 2021, doi: 10.1002/nme.6712.
- J. Kneifl and J. Fehr, “Machine Learning Algorithms for Learning Nonlinear Terms of Reduced Mechanical Models in Explicit Structural Dynamics,” PAMM, vol. 20, Art. no. S1, Mar. 2021, doi: 10.1002/pamm.202000353.
- Funding
-
Funded by Deutsche Forschungsgemeinschaft (DFG, German Research Foundation) under Germany's Excellence Strategy - EXC 2075 – 390740016. We acknowledge the support by the Stuttgart Center for Simulation Science (SimTech).
- Principal investigators
- Research Staff
-
Jonas Kneifl, M.Sc. (ITM)

Jörg Fehr
Prof. Dr.-Ing.