Description
Neweul-M² is a software package for the dynamic analysis of mechanical systems with the multibody system method. It comprises the computation of the symbolic equations of motion and the simulation of the dynamic behavior. It is running in Matlab using the Symbolic Math Toolbox for symbolic calculations. This offers the advantages of both an off-the-shelf symbolic manipulator and the vast numerical abilities of Matlab.
Screenshots
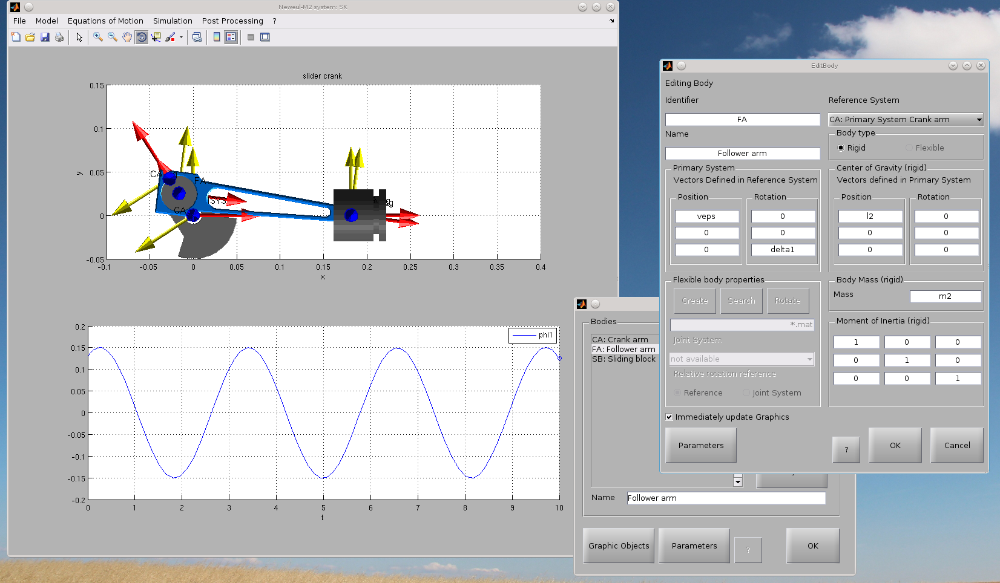
In the following picture you can see the animation of a multibody system while editing one body with the graphical user interface.
Demonstration
{kind=link}
Manual
A manual is provided within the Matlab documentation.
Multibody Systems
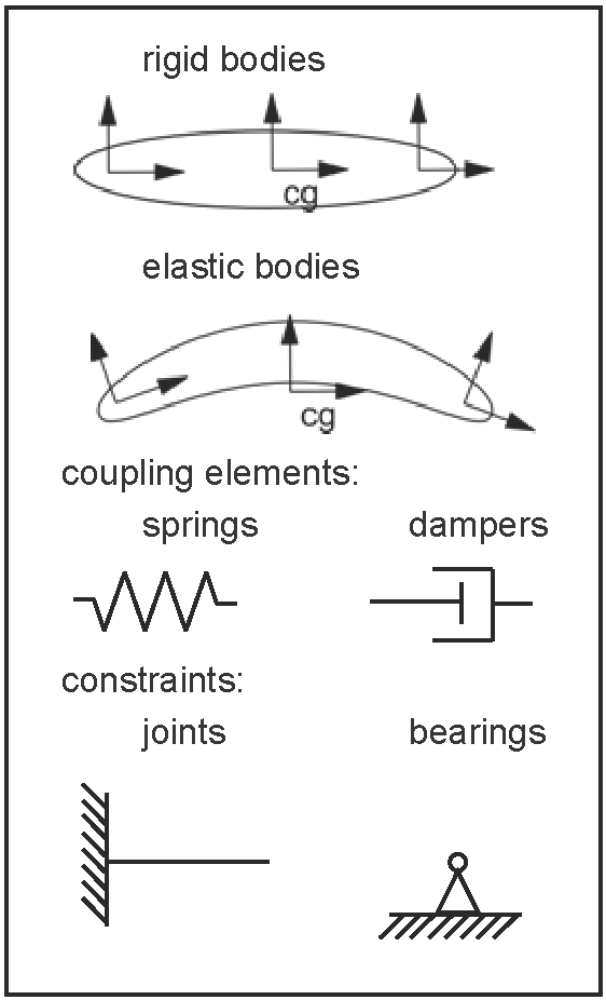
The dynamical analysis of a mechanical system starts with the modeling process. The real physical system is approximated by an idealized model. Multibody systems are mechanical models consisting of
- rigid and elastic bodies,
- arbitrary constraining elements (joints, position control elements),
- passive coupling elements (springs, dampers), and
- active coupling elements (servo motors).
The topological structure of the models is arbitrary, thus possible configurations are
- systems with tree structure,
- the special case of systems with chain structure, and
- systems with closed kinematic loops.
The scleronomic or rheonomic constraints can in general be holonomic or nonholonomic. Currently the program is restricted to holonomic as well as very simple non-holonomic systems.

Historical Background
There has been a software package called NEWEUL, which has been successfully applied in industrial and academic research institutions since 1979. It was written in FORTRAN using its own symbolic manipulator. However, in 2007 this new version has been started. As mentioned before, it is written in Matlab using the Symbolic Math Toolbox for the symbolic manipulations. From this combination of its predecessor NEWEUL and the use of Matlab with its symbolic engine MuPad the name Neweul-M² has evolved. If you have any questions concerning the current or the former version of the program, please don't hesitate to contact us. For reference, the manual of the old version is still available here.
Fields of Application
The software package NEWEUL and the new version Neweul-M² have been successfully applied in industrial and academic research institutions since 1979. The major fields of application are
- vehicle dynamics,
- satellite dynamics,
- dynamics of machinery,
- biomechanics,
- dynamics of mechanisms.
Neweul-M² Input
The software package Neweul-M² offers two approaches for multibody system modeling. These are
- the command based mode and
- the graphical user interface.
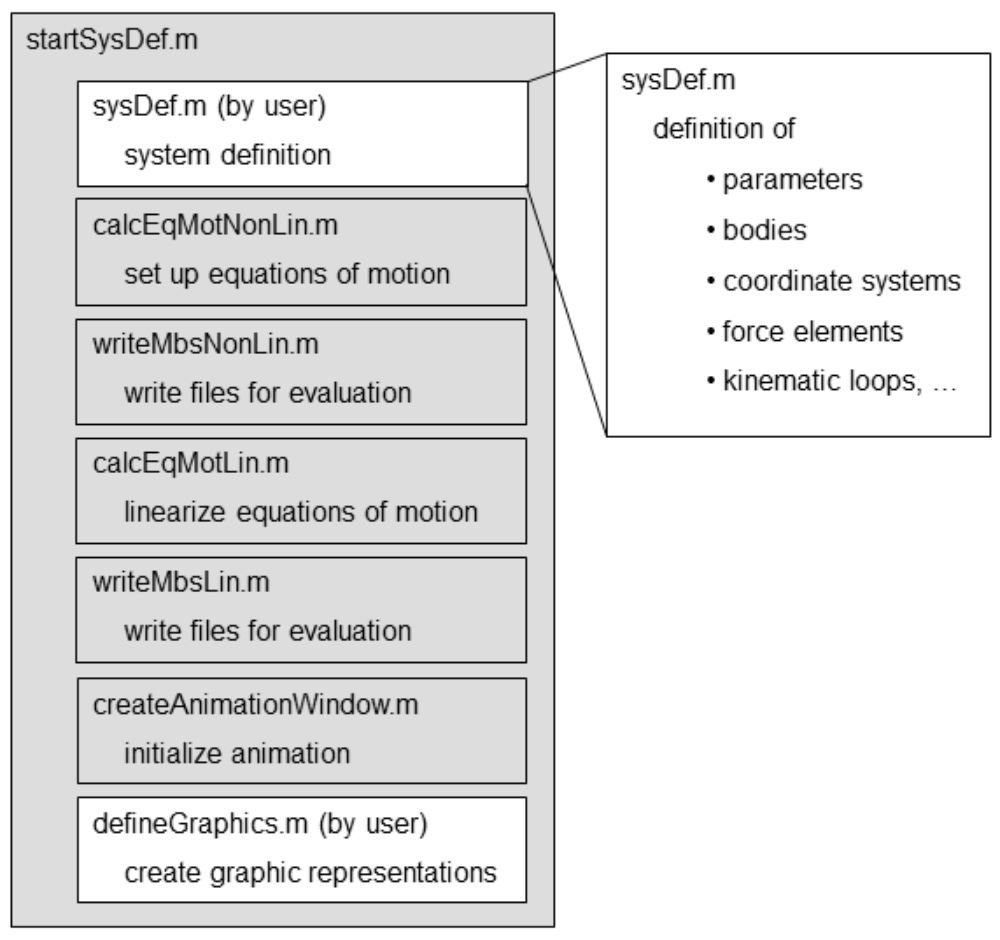
In the command based mode, the commands are usually collected in input files, like startSysDef.m. But they can also be entered directly in the Matlab command window. The user has to specify rather simple expressions for the relative kinematics and mass distribution. Applied forces are realized by force elements like spring/damper combinations. They can be defined with the help of symbolic parameters which can also be specified here. To make the set up easier, examples are available, so the user can adjust existing files. Up to this point, no numerical values are necesary. As soon as numerical values have been assigned to the constant parameters, graphic representations can be created.
Equations of Motion
Neweul-M² generates the equations of motion of multibody systems in symbolic form. The computation is based on a Newton-Euler formalism with application of the principles of d'Alembert and Jourdain.
After the input data has been read, the system is fully described. Then the symbolic equations of motion are calculated with the help of the Matlab Symbolic Toolbox. Those existing equations of motion then can also be linearized. After the equations are set up, Matlab m-files for numerical evaluation are written. The symbolic expressions can be edited and extended at any time, offering a lot of flexibility on the way to model a system. On the other hand, those m-files provide fast evaluation of the expressions and easy reusability for other software outside of Neweul-M².
C-Export
Because the equations of motion are available symbolically, the complete model including the defined in- and outputs can easily be exported to the programming language C. The compiled C-code can be used for faster numerical evaluation of the equations of motion in Matlab, for example. On the other hand, C-MEX S-functions and the corresponding Simulink blocks can be created, which allow an efficient embedding of the model in Simulink. Also the coupling of the model with other software like Pasimodo gets much easier. Since the complete C-code is available and editable for the user at any time, using the model outside of Matlab is also possible.
Simulation
Neweul-M² offers a wide set of functions for the simulation, analysis and optimization of the system defined before. Among them, the most important features are
- time integration,
- kinematic analysis,
- modal analysis,
- frequency response and transfer function,
- sensitivity analysis,
- parameter optimization, and
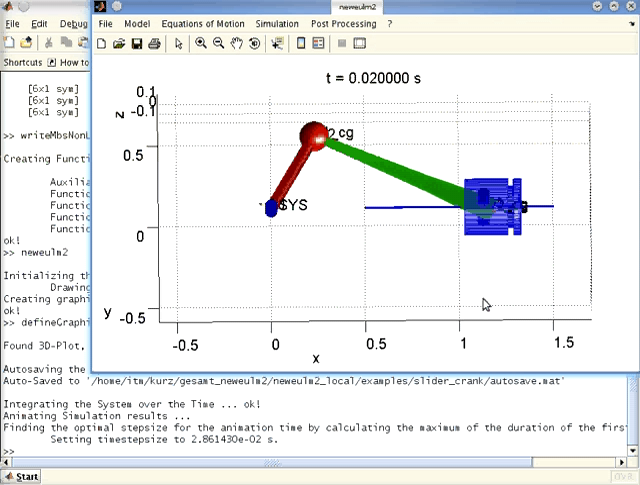
- animation of the results.
As these simulation and analysis functions mostly use only the files for the numerical evaluation, those files can be used for any user-written or third party analysis software as well.
- Burkhardt, M.; Seifried, R.; Eberhard, P.: Aspects of Symbolic Formulations in Flexible Multibody Systems.
Journal of Computational and Nonlinear Dynamics, Special Issue on Multibody Dynamics Formulations, J. Cuadrado (ed.), 2013,[doi:10.1115/1.4025897]. - Kurz, T.; Burkhardt, M.; Eberhard, P.: Systems with Constraint Equations in the Symbolic Multibody Simulation Software Neweul-M².
In: Proceedings of the ECCOMAS Thematic Conference Multibody Dynamics 2011, Brussels, Belgium, 2011. - Kurz, T; Eberhard, P.: Flexible Bodies in Symbolic Multibody Systems with Neweul-M².
In: Proceedings of the EUROMECH Colloquium 515, Blagoevgrad, Bulgarien, 2010. - Kurz, T.; Eberhard, P.; Henninger, C.; Schiehlen, W.: From Neweul to Neweul-M²: Symbolical Equations of Motion for Multibody System Analysis and Synthesis,
Multibody System Dynamics, Vol. 24, No. 1, pp. 25-41, 2010. [doi:10.1007/s11044-010-9187-x]. - Kurz, T.; Eberhard, P.: Symbolic modeling and analysis of elastic multibody systems.
In: Proceedings of International Symposium on Coupled Methods in Numerical Dynamics, Split, 2009
- Haug, J.; Piram, U.; Schiehlen, W.; Schirle, T.: Modelling of a Passenger Coach as Elastic Multibody System. In: Proceedings of the 1997 ASME Design Engineering Technical Conferences, Ravani, B. (ed.) 1997.
- Schiehlen, W.: Multibody System Dynamics: Roots and Perspectives. Multibody Sys. Dyn. 1 (1997) S. 149-188.
- Eberhard, P.: Zur Mehrkriterienoptimierung von Mehrkörpersystemen. Düsseldorf: VDI-Verlag, Fortschr.-Ber. Reihe 11, Nr. 227, 1996.
- Bestle, D.: Analyse und Optimierung von Mehrkörpersystemen. Berlin: Springer-Verlag, 1994.
- Schiehlen, W.: Symbolic Computations in Multibody Systems. In: Computer-Aided Analysis of Rigid und Flexible Mechanical Systems, M. F. O. S. Pereira and J. A. C. Ambrosio (eds.). Dordrecht: Kluwer Academic Publishers 1994, S. 101-136.
- Schirm, W.: Symbolisch-numerische Behandlung von kinematischen Schleifen in Mehrkörpersystemen. Düsseldorf: VDI-Verlag, Fortschr.-Ber. Reihe 11, Nr. 198, 1993.
- Leister, G.: Beschreibung und Simulation von Mehrkörpersystemen mit geschlossenen kinematischen Schleifen. Düsseldorf: VDI-Verlag, Fortschr.-Ber. Reihe 11, Nr. 167, 1992.
- Schiehlen, W. (ed.): Multibody Systems Handbook. Berlin: Springer-Verlag, 1990.
- Schmoll, K.-P.: Modularer Aufbau von Mehrkörpersystemen unter Verwendung der Relativkinematik. Düsseldorf: VDI-Verlag, Fortschr.-Ber. VDI-Z, Reihe 18, Nr. 57, 1988.
- Zamow, J.; Witte, L.: Fahrsimulation unter Verwendung des Starrkörperprogrammes ADAMS. VDI-Berichte Nr. 699, 1988, S. 287-309.
- Schiehlen, W.; Eberhard, P.: Applied Dynamics. Cham: Springer, 2014.
- Rill, G.; Klinkner, W.; Schwarz, K.: Nichtlineare Vertikaldynamik von Fahrzeugen - Vergleich zwischen Messung und Rechnung. In: Berechnung im Automobilbau, VDI-Bericht Nr. 537, 1984, S.191-213.
- Schiehlen. W.O.: Computer Generation of Equations of Motion. In: Computer Aided Design and Optimization of Mechanical System Dynamics, E.J. Haug (ed.) Berlin: Springer-Verl. 1984, S.183-215.
- Becker, P.-J.; Jacubasch, A.; Kuntze, H.-B.: Möglichkeiten und Grenzen rechnergestützter Verfahren bei der Entwicklung fortgeschrittener Regelsysteme für Industrieroboter. Langen, Aussprachetag: Rechnergestützter Regelkreisentwurf, 1983, S. 131-149.
- Kreuzer, E.: Symbolische Berechnung der Bewegungsgleichungen von Mehrkörpersystemen. Düsseldorf: VDI-Verlag, Fortschr.-Ber. VDI-Z, Reihe 11, Nr. 32, 1979.
- Schiehlen. W.; Kreuzer, E.: Rechnergestütztes Aufstellen der Bewegungsgleichungen gewöhnlicher Mehrkörpersysteme. Ing-Arch. 46 (1977) S. 185-195.
The software package Neweul-M² is written in Matlab. It requires Matlab with the Symbolic Math Toolbox installed. For the basic functionality there are no other requirements. For certain features of the software, e.g. optimization, additional toolboxes may be necessary. Because the user is kept in the Matlab environment, the hardware has to be able to run Matlab. If this is provided, currently no other restrictions are known. It is tested under Linux and Windows and with different versions of Matlab.
The software package Neweul-M² is delivered as a compressed archive along with some examples and a user manual.
- Institute of Mathematics, TU Berlin
- Institute for Numerical and Applied Mathematics, University of Goettingen
- Institute of Structural Analysis, Leibniz University Hannover
- Lehrstuhl für Numerische Mechanik, University of Siegen
- Institute of Vehicle Technology, University of Siegen
- Institute for System Dynamics, University of Stuttgart
- Institute of Control Systems, Technical University of Hamburg-Harburg
- Clemson University, Clemson, SC, USA
- Institute of Applied System Dynamics (IAS), Hochschule Aalen
- Rehabilitation Engineering Lab, ETH Swiss Federal Institute of Technology, Zürich, Switzerland
- Institut of process- and mobile machines, IVMA, Technical University of Dresden
- ESA, European Space Technology Centre, Noordwijk, Netherlands
- Institute of Internal Combustion Engines and Automotive Engineering, IVK, University of Stuttgart
- Institute for Mechanics and Ocean Engineering, Technical University of Hamburg-Harburg
- ThyssenKrupp Transrapid GmbH
- Max-Planck-Institute for Dynamics of Complex Technical Systems, Magdeburg
- Toyohashi University of Technology, Japan
- School of Life Science and Technology, Tongji University, Shanghai, China
- TRUMPF GmbH + Co. KG
- Autonomous Systems Lab, ETH Swiss Federal Institute of Technology, Zürich, Switzerland
- Daimler AG
- TRW Automotive
- Heidelberg University Hospital
- Institute of Production Science, Karlsruhe Institute of Technology
- Vehicle-Infrastructure-Driver Interaction Laboratory, LIVIC, Versailles, France
- Theoretical Mechanics Dept., Moscow Aviation Institute, Russia
- Dept. of Statistics, University of Johannesburg, South Africa
- University Dunarea de Jos, Galati, Rumania
- IRS, Institute of Space Systems, University of Stuttgart
- Heilbronn University
- University of Vigo, Spain
- University of Delaware, USA
- Carl Zeiss SMT AG
- JÖRN GmbH
- Institut für Mechanik, Technische Universität Berlin
- CRRC Corporation Limited
- Indian Institute of Technology, Dehli, Indien
- King Mongkut's University of Technology Thonburi, Thailand
- Laboratory of Robotics and Multibody System, Tongji University, Shanghai, China
- Virtual Automation Lab, Hochschule Esslingen
- Chair of Dynamics and Mechatronics (LDM), Paderborn University
- ISW, Institute for Control Engineering of Machine Tools and Manufacturing Units, University of Stuttgart
- Chair of Engineering Mechanics and Vehicle Dynamics, Brandenburg University of Technology
- PREMIUM ROBOTICS GmbH, Leinfelden-Echterdingen
- Department of Metrology and Standardization, Kyrgyz State Technical University, Kyrgyz Republic
- Faculty of Engineering and Physical Sciences, University of Surrey, United Kingdom
- Department of Mechanical Engineering, LUT University, Finland
A tutorial video of Heilbronn University of Applied Science shows the basic steps of modeling, the computation of the symbolic equations of motion and finally the animation of the dynamic multibody system. (in German)
{kind=link}
{kind=link}
If you have any questions, you can simply write a mail, you will always reach the currently responsible person.
Contact

Arnim Kargl
M.Sc.
Peter Eberhard
Prof. Dr.-Ing. Prof. E.h.- Profile page
- +49 711 685 66388
- Write e-mail
- Pfaffenwaldring 9, 70569 D-Stuttgart