Beschreibung
Rädertriebe kommen in der Technik unter anderem in Verbrennungsmotoren vor, um dort Nebenaggregate wie z.B. Pumpen anzutreiben. Deshalb bestehen diese meißt aus mehreren Zahnradstufen mit den entsprechenden Übersetzungsverhältnissen. Zahnräder sind gewichtsoptimierte Bauteile, um im Betrieb die gewünschte Drehbewegung möglichst direkt weiterzugeben. Im Betrieb kommt es zu dynamischen Wechsellasten, verursacht durch Nebenaggregate. Dabei können die Zahnflanken im Kontakt voneinander abheben und hin- und herschlagen. Zahnhämmern und ähnliche dynamische Effekte führen zu hohen Kräften im Zahnrad und führen zu elastischen Verformungen des Zahnrads. Diese Kräfte sind aufgrund der kurzen Dauer stoßartig. Dabei kommt es ebenfalls zur Wellenausbreitung. Die kurzen Stöße beeinflussen die Lebensdauer und sind deshalb von besonderem Interesse. Dabei ist die Kenntnis z.B. über die wirkenden Kräfte, über Verformungen und über Wellenausbreitung ein wesentlicher Bestandteil der Analyse von dynamischen Phänomenen wie Getriebehämmern als auch von Abwälzvorgängen.
Die Modellierung und Simulation der Zahnräder erfolgt in der Industrie meißt mit kommerziellen Mehrkörper-Programmsystemen. Dabei versucht man, die Elastizität der Radkörper durch Feder-Däpfer Kopplungen entgegenzuwirken, doch haben Untersuchungen gezeigt, dass für eine genaue Berechnung der Kräfte dieser Ansatz nicht ausreicht, da es z.B. aufgrund der Elastizität dazu kommen kann, dass sich mehrere Zahnpaare im Eingriff befinden, was bei starren Mehrkörpersystemen ausgeschlossen ist. Elastische Modellierungsansätze sind notwendig. Die Methode der Finiten Elemente bietet die Möglichkeit der elastischen Modellierung, doch ist der Rechenaufwand für FE-Systeme sehr groß aufgrund der vielen Freiheitsgrade, was zu sehr langen Integrationszeiten führt. Dadurch sind in angemessener Zeit keine langen Integrationszeiten möglich.
Ein guter Kompriss zwischen schnellen Integrationszeiten und ausreichender Genauigkeit liefert ein elastisches Mehrkörpersystem. Dieses wird durch ein mitbewegtes Referenzsystem beschrieben, welches große Starrkörperbewegungen als auch kleine elastische Verformungen erlaubt. Für die elastische Beschreibung der Verformung werden die reduzierten Massen- und Steifigkeitsmatrizen des FE-Modells benutzt, was zu erheblich kleineren Systemen führt. Die Kontaktberechnung zweier Zahnflanken erfolgt durch ein Node-to-Segment Ansatz im nodalen Raum. Aufgrund der speziellen Geometrie der Zahnräder lässt sich die Kontaktberechnung in eine Grob- und Feinerkennung aufteilen, was die Effizienz deutlich erhöht. Durch die effiziente und speichersparende Systembeschreibung ermöglicht die Methode nicht nur die dynamische Untersuchung zweier Zahnräder, sondern es können auch mehrere Umdrehungen von kompletten Rädertrieben simuliert werden.

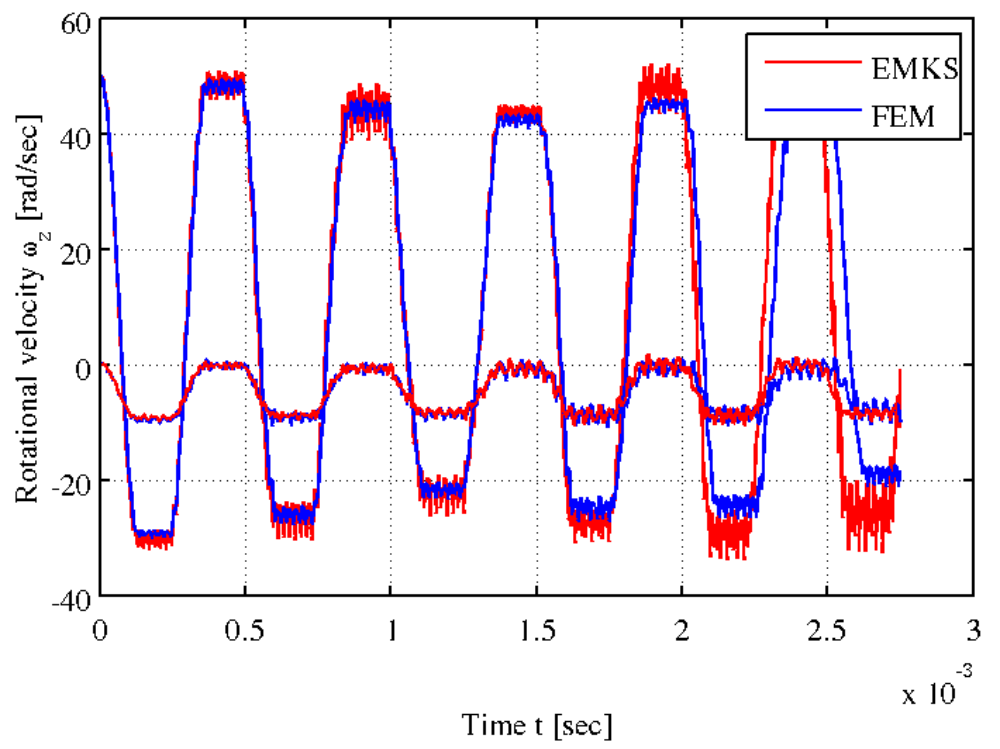
In Abbildung 1 ist das FE-Modell zweier Zahnräder dargestellt. Beide Zahnräder zusammen haben über 300000 Knoten, was zu großen Systemmatrizen führt. Das elastische Mehrkörpersystem hingegen kommt mit einigen wenigen Moden für die elastische Beschreibung aus. Abbildung 2 vergleicht die Winkelgeschwindigkeit der beiden Zahnäder während der Simulation und verdeutlicht, dass die verwendete Methode des elastischen Mehrkörpersystems gepaart mit einer Kontakterkennung sehr gut mit dem FE-Ergebnis übereinstimmt, dieses jedoch in erheblich kürzerer Berechnungszeit erzielt wird.
Ansprechpartner
