Project goals
- development of strategies for the joint mechanical and control design of elastic multibody systems
- strategies enabling efficient analysis of large-scale systems for automated design
- design objectives for elastic systems including transient phenomena and effects not covered by formalized criteria, including generalized notions of controllability
- machine-learned surrogates, objectives and control strategies
- robust design regarding manufacturing uncertainties and operation conditions
Preliminary work
by ITM
- generic methods for multibody system modeling and optimization
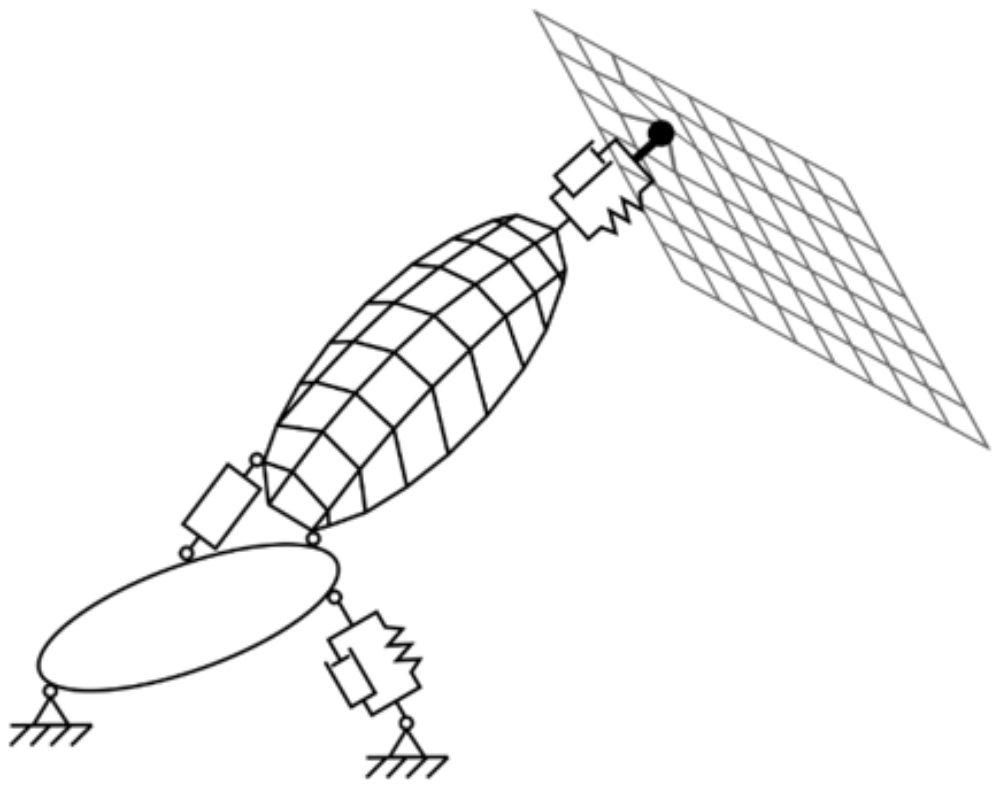
- modeling, model-order reduction and simulation of elastic multibody systems
- control strategies, especially optimal control based on model predictive control
by TMF
- sensitivity analysis and multi-objective optimization of multibody systems
- design concepts for complex technical systems on industrial scale (turbo machinery and automotive)
- metamodeling and AI strategies for design
First Phase Achievements
A short overview about goals achieved during the first phase
- implementation and benchmarking of different neural networks for the dimensional synthesis of four-bar linkages
- intuitive design assistant for the generation of task-specific four-bar linkages including desired velocity profiles
- automatic control design based solely on data-driven methods
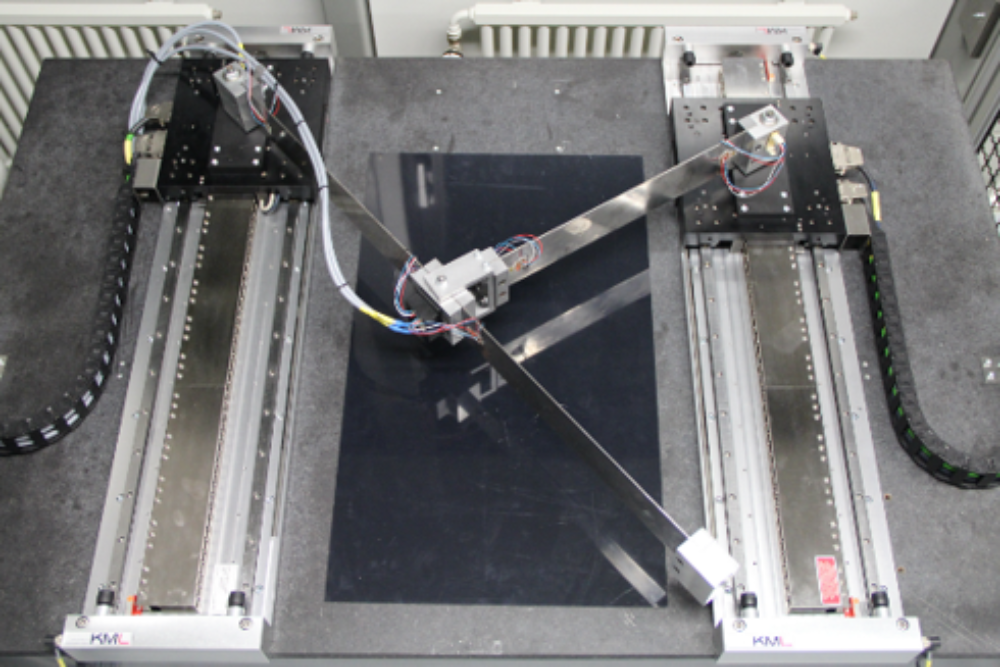
- hardware demonstrator for data generation and the comparison of simulation and real-world experiments
- simulation of mechanisms with flexible components and application of data-driven control
Interactive Design Assistant
The presented design assistant allows for an almost instantaneous design of path-specific four-bar linkages. In a first step, the user draws a target path which should be followed. A neural network is then queried on the backend and the proposed mechanism with its corresponding path are plotted. During a second step, the user can define a desired velocity profile for the automatic generation of a suitable controller. For the entire pipeline no profound mechanism knowledge is required as long as data can be collected by simulation.
{kind=link}
Potential contribution of modules to a holistic design assistant system
- module for control design and controller synthesis
- module for mechanical design of dynamical technical systems
- module to assess (generalized notions of) controllability of flexible multibody systems
- optimization-driven assistant for joint design of mechanics and control
- surrogate models for elastic multibody systems
- benchmark experiment for validating control strategies
How could other projects support our work?
- specific machine learning methods for learning multi-modal solution spaces while fulfilling physical constraints
- effective parameterizations of two- and three-dimensional workspaces
- experience on sensor fusion of different measurement instruments
- tell us about your mechanical and control design problems
How can we support other projects?
- experience in elastic multibody system modeling, model-order reduction and simulation
- control concepts for multibody systems
- experience in multi-criteria optimization, problem formalization and process integration
- experience with design parameterization, function approximation and statistical sensitivity analysis
- theoretical and practical machine learning experience
First Phase Publications
- Röder, B.; Hajipour, S.; Ebel, H.; Eberhard, P.; Bestle, D. (2024). Design of a Four-bar Mechanism from Hand Drawings of Desired Coupler Trajectories and Velocity Profiles. Preprint series of the SPP 2353, No. 3, 21 pages, submitted on 7.8.2024 to J. Mechanics Based Design of Structures and Machines - Special Issue on Data-Driven Methods for Multibody System Dynamics.
- Röder, B.; Ebel, H.; Eberhard, P. (2023). Towards Intelligent Design Assistants for Planar Multibody Mechanisms. In: Proc. of Applied Mathematics and Mechanics (PAMM), Vol. 23, No. 3.
- Röder, B.; Ebel, H.; Berkemeier, M.; Eberhard, P. (2024). A Dual-Network Approach for Avoiding Feature Ambiguity in the Synthesis of Crank-Driven Four-Bar Linkages. Preprint series of the SPP 2353, No. 4, 13 pages.
- Hajipour, S.; Bestle, D. (2024). Data-based Design of a Tracking Controller for Planar Closed-loop Mechanisms. In: Proc. of NAFEMS Nordic Conference on AI and ML in Simulation Driven Design, Lund. Grandas Franco, J.C.; Bestle,
- D.; Niehoff, M. (2023). Modeling and Optimization of a Controlled Lambda Robot via Surrogate Models. In: Proceedings of NAFEMS Multibody Dynamics Conference, Munich, pp. 63-66.
- Niehoff, M.; Bestle, D.; Kupijai, P. (2024). Model-based Design Optimization Taking into Account Design Viability via Classification. Engineering Modelling, Analysis and Simulation, Vol. 1(1), pp. 1-12, DOI 10.59972/c7b5hzx7.
- Bielitz, T.; Bestle, D. (2024). Artificial Recurrent Model for Parameter Identification of Dynamic Systems. In: Proc. of Applied Mathematics and Mechanics (PAMM), e202400015, https://doi.org/10.1002/pamm.202400015.
- Wohlleben, M.; Röder, B.; Ebel, H.; Muth, L.; Sextro, W.; Eberhard, P. (2024). Hybrid Modeling of Multibody Systems: Comparison of Two Discrepancy Models for Trajectory Prediction. In: Proc. in Applied Mathematics and Mechanics (PAMM), Vol. 24, No. 2.
- Payrebrune, K. de; Flasskamp, K.; Ströhla, T.; Sattel, T.; Bestle, D.; Röder, B.; Eberhard, P.; Peitz, S.; Stoffel, M.; Gulakala, R.; Borse, A.; Wohlleben, M.; Sextro, W.; Raff, M.; Remy, C. D.; Yadav, M.; Stender, M.; Delden, J. van; Lüddecke, T.; Langer, S. C.; Schultz, J.; Blech, C. (2024). The Impact of AI on Engineering Design Procedures for Dynamical Systems.URL: https://arxiv.org/abs/2412.12230, submitted on 20.11.2024 to Technische Mechanik.
- Ebel, H.; Delden, J. van; Lüddecke, T.; Borse, A.; Gulakala, R.; Stoffel, M.; Yadav, M.; Stender, M.; Schindler, L.; Payrebrune, K. de; Raff, M.; Remy, C.D.; Röder, B.; Eberhard, P. (2024). Data Publishing in Mechanics and Dynamics: Challenges, Guidelines, and Examples from Engineering Design. URL: https://doi.org/10.48550/arXiv.2410.18358, submitted on 27.11.2024 to Data-Centric Engineering.
- Röder, B.; Ebel, H.; Eberhard, P.: Motion and Motor-Current Data of a Four-Bar Linkage. In: DaRUS - Data Repository of the University of Stuttgart, 2024.
Contact
Prof. Dr.-Ing. habil. Hon. Prof. (NUST) Dieter Bestle
Technische Universität Cottbus-Senftenberg
Siemens-Halske-Ring 14
03046 Cottbus
Tel.: +49 355 693024
Fax: +49 (0) 355 69 3038
Email: bestle@b-tu.de
Prof. Dr.-Ing. Prof. E.h. Peter Eberhard
Universität Stuttgart
Pfaffenwaldring 9
70569 Stuttgart
Tel.: +49 711 685 66388
Fax: +49 711 685 66400
Email: peter.eberhard@itm.uni-stuttgart.de
Sanam Hajipour Talkouei
Email: hajipour@b-tu.de
Benedict Röder
Email: benedict.roeder@itm.uni-stuttgart.de