In addition to digital development, it is also very important to consider all safety-relevant driving phases in order to optimally protect the occupants. The relevant driving phases can be divided as shown in figure 1.

Transition from comfort to vehicle safety
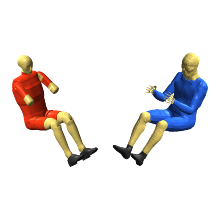
In normal driving, where mainly active vehicle safety systems (lane keeping assistant, AEB, ...) are active, an attempt is made to prevent a crash. In this phase it is already of great importance to understand the interaction of the occupants and the occupant movement. Thus, in the EMMA4Drive project, a digital human model is being developed to efficiently simulate the occupant's movement. Such a model allows the development and investigation of new seating positions made possible by autonomous driving cars. Among other things, it will be investigated how an occupant can be moved from a comfortable reclining position to a safe upright position before a vehicle impact occurs.
{kind=link}
Pre- and in-crash simulations
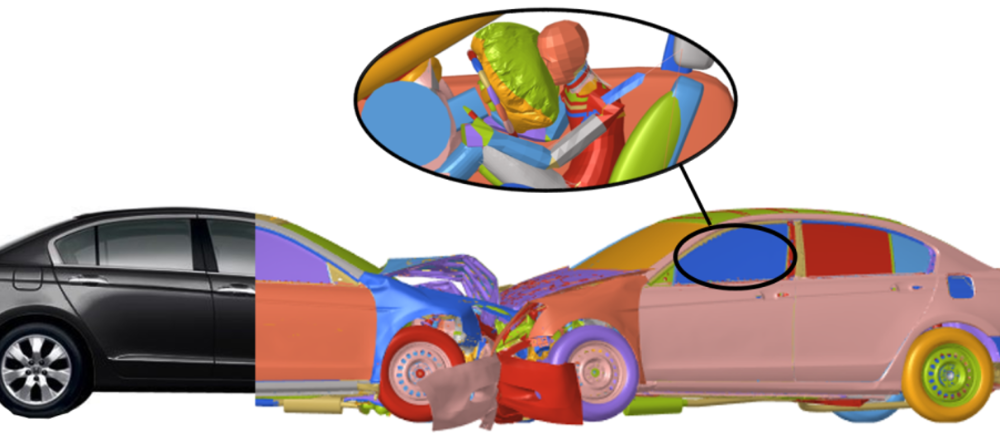
If the crash is unavoidable, crash simulations are essential nowadays. Crash tests have been carried out with dummies since the 1950s. These real tests are very expensive because vehicle prototypes have to be built during the development process that can no longer be used after the crash test.
Various dummy models are used in crash tests in order to estimate the loads on the human body in a crash and to be able to develop appropriate occupant protection systems. Depending on the crash scenario, different regions of the body are subjected to loads and therefore, for example, different dummy models are used for investigations of side impacts than for frontal impacts. It is questionable how accurately a mechanical dummy can represent the human body. However, it can only provide valid results for a limited range. For the currently available dummy models, this is the so-called in-crash phase.
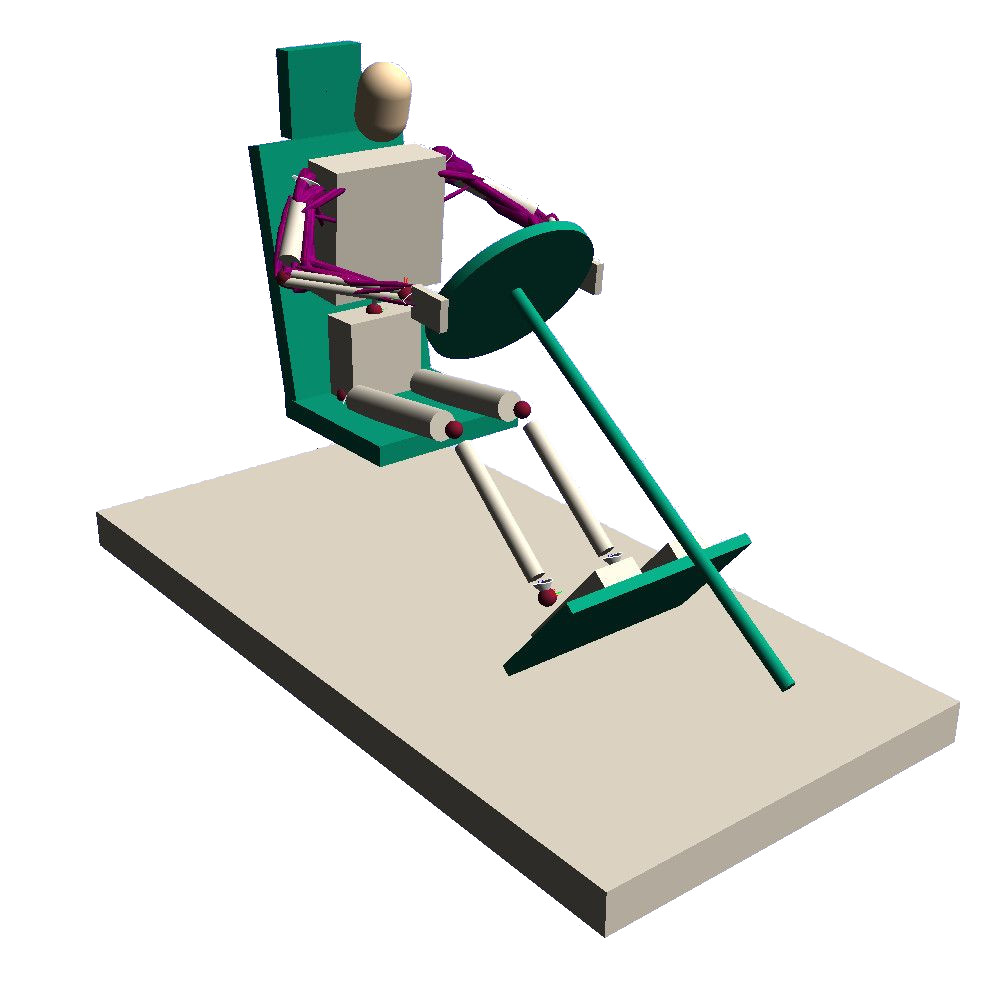
Thus, simulations are increasingly replacing real crash tests and digital human models are replacing dummies to enable efficient investigations and to gain a deeper understanding of occupant injury mechanisms. Experiments and simulations deal in detail with human models, the further development of active human models that can represent muscle activations before the crash and the validation of these on a driving simulator.
One injury mechanism that has always had high socio-economic costs and is difficult to control with current safety systems is the so-called whip-lash. A rapid movement of the head and a high load on the neck that affects the occupant in a rear-end collision.
Acceleration of the simulation
In addition to the precise investigation of the forces acting on humans, an exact investigation of the deformation of the vehicle in the crash is of course also indispensable. However, due to the detailed models used there (several million degrees of freedom), even computational clusters need too long to test all interesting parameters in the ever shorter development times. Here it is obvious to first carry out a model reduction (MOR), i.e. to simplify the model to such an extent that the computing time of the explicit finite element methods decreases significantly, but the model retains its properties as far as possible. Surrogate modelling, among other topics, deals with how this can be done efficiently and without losing important information.
Holistic vehicle safety
In addition to improved data availability and increased networking between active and passive vehicle safety also makes holistic coordination of safety possible. With a holistic view of vehicle safety, better occupant protection is possible in many scenarios. In order to develop vehicle safety from the trigger-based activation of individual components and actuators to a holistic and comprehensible safety decision, the predictive vehicle safety project has started.
Protection of all road users
General road safety also includes adequate protection for particularly vulnerable road users. The mortality rate of motorbike accidents per kilometre driven is many times higher than the mortality rate of other means of transport. This is due to the low passive protection of motorbike passengers. The motorcycle safety project is dealing with the task of improving passive safety of motorcycles.
Contact
