ConcentricTube Robots
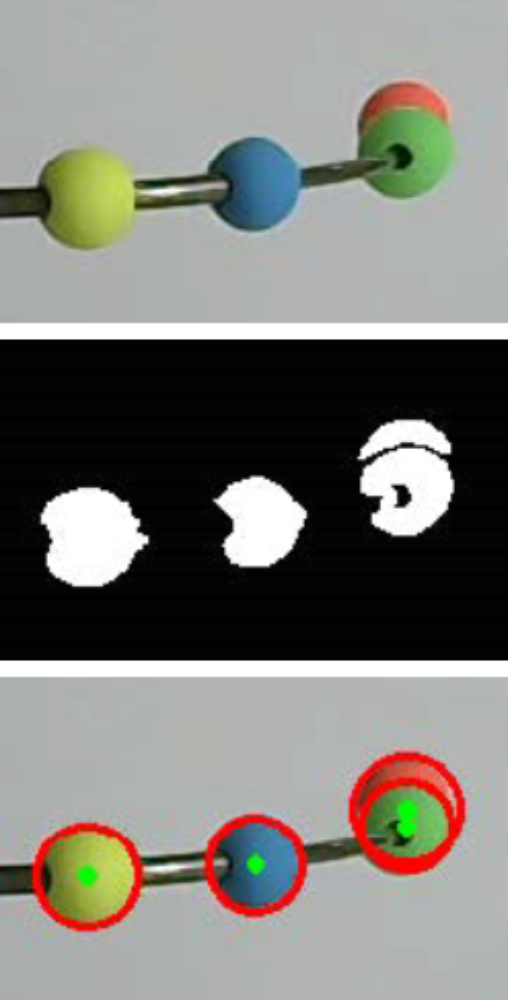
A photogrammetric measurement system can provide data of markers on the robot’s backbone
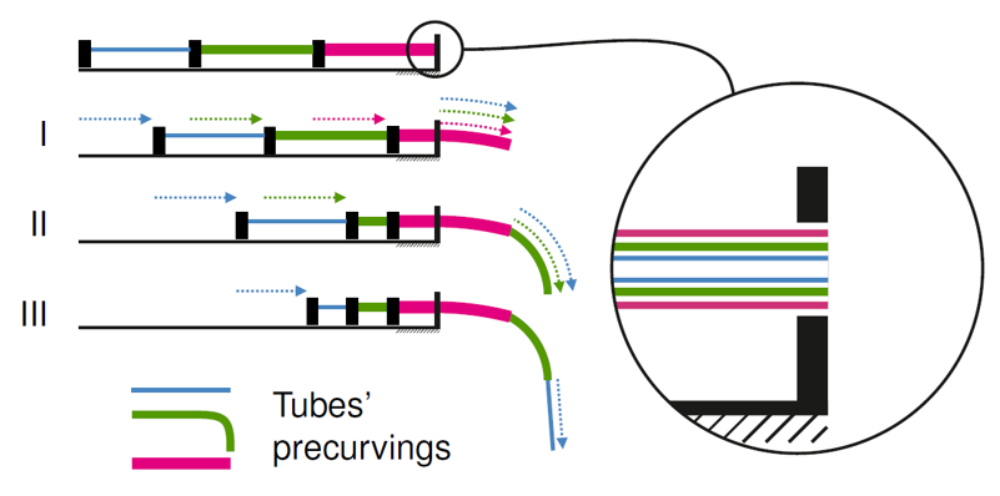
Schematic of a three-tube concentric tube robot
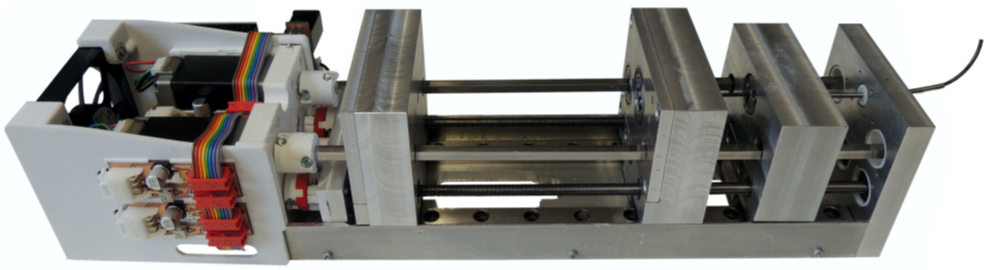
Computer-controlled actuation system for a concentric tube robot
Work plan of our project
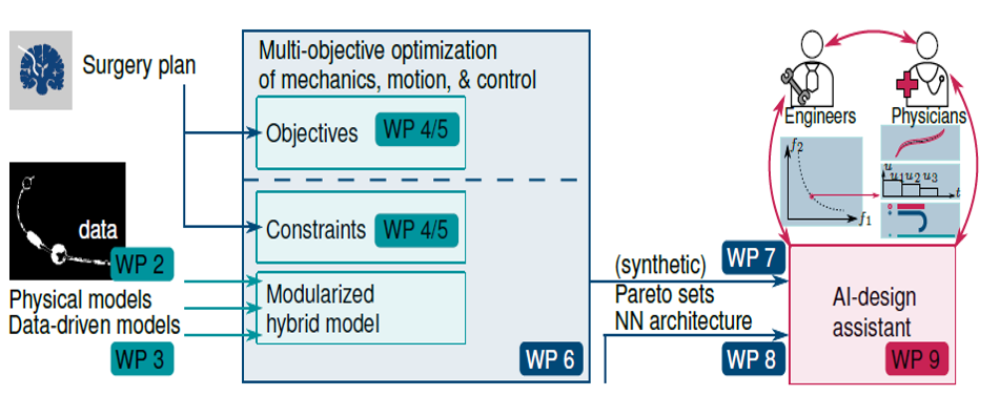
Key methods
- Data-based enhancement of physical models
- Multi-objective optimization with combined genetic/classical algorithms
- Learning of Pareto sets
How can we support other projects?
- Motion data of concentric tube continuum robot (from photogrammetric system)
- Multiobjective optimization methods (knowledge and software)
- In future: KI-methods for (sub)modules, for inverse problems, etc
How could other projects support our work?
- Exchange on physics-based machine learning approaches
- Exchange on hybrid techniques for multiobjective optimization
- In future: other cases (data, model) evaluate generalization or methods
Modules contributing to a holistic design assistant:
- Physics-based learning.
- Learned hysteresis effect.
- Multiobjective optimization methods.
- Hybird (i.e. combined genetic and classical) methods.
- Machine learning for inverse multiobjective optimization problems.
- Benchmark problem: design assistant for surgery with concentric tube robots, e.g. deep brain neurosurgery.
Contact
Prof. Dr. Kathrin Flaßkamp
Universität des Saarlandes
66123 Saarbrücken
Tel.: +49 681 302 4416 (Sekretariat)
Email: kathrin.flasskamp@uni-saarland.de
Prof. Dr.-Ing. Thomas Sattel
Technische Universität Ilmenau
Max-Planck-Ring 12
98693 Ilmenau
Werner-Bischoff-Bau / Raum 2120
Tel.: +49 3677 692486
Email: thomas.sattel@tu-ilmenau.de
Zhaoheng Ding
Emai: zhaoheng.ding@tu-ilmenau.de
Matthias Hoffmann
Email: matthias.hoffmann@uni-saarland.de