Multiobjective optimization of complex multibody systems
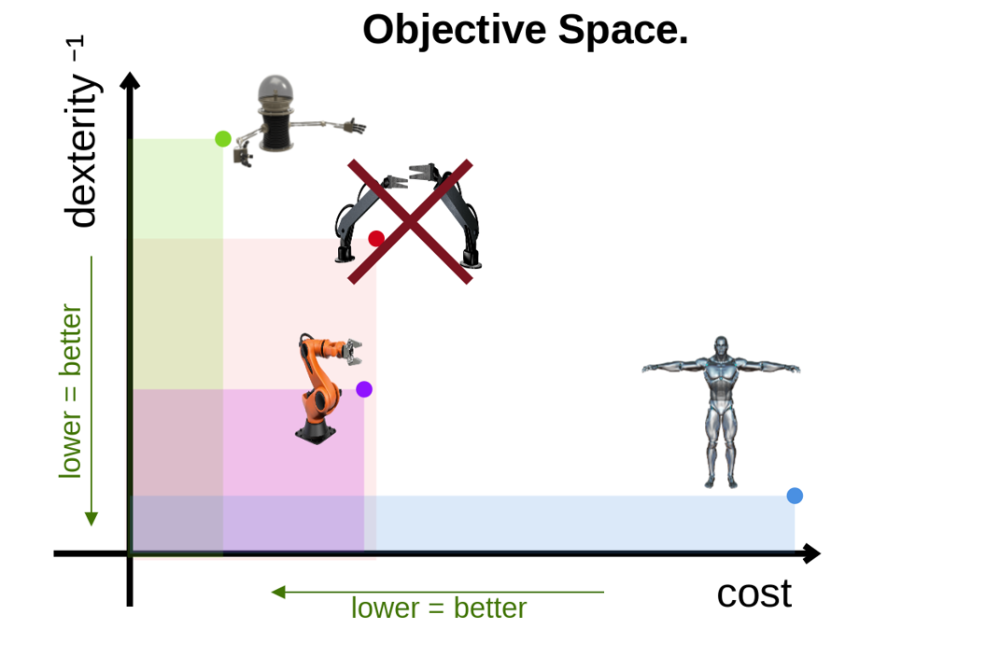
In almost all technical systems, we want to optimize several conflicting criteria simultaneously such as, the minimization of the energy consumption, the construction cost, or the system complexity. Instead of a single optimum, we thus need to calculate the Pareto front of optimal compromise solutions (cf. the Figure below).
- Problem: Model-based multiobjective optimization is very expensive
- Solution: Use efficient and accurate surrogate models
Hybrid modeling of multibody systems
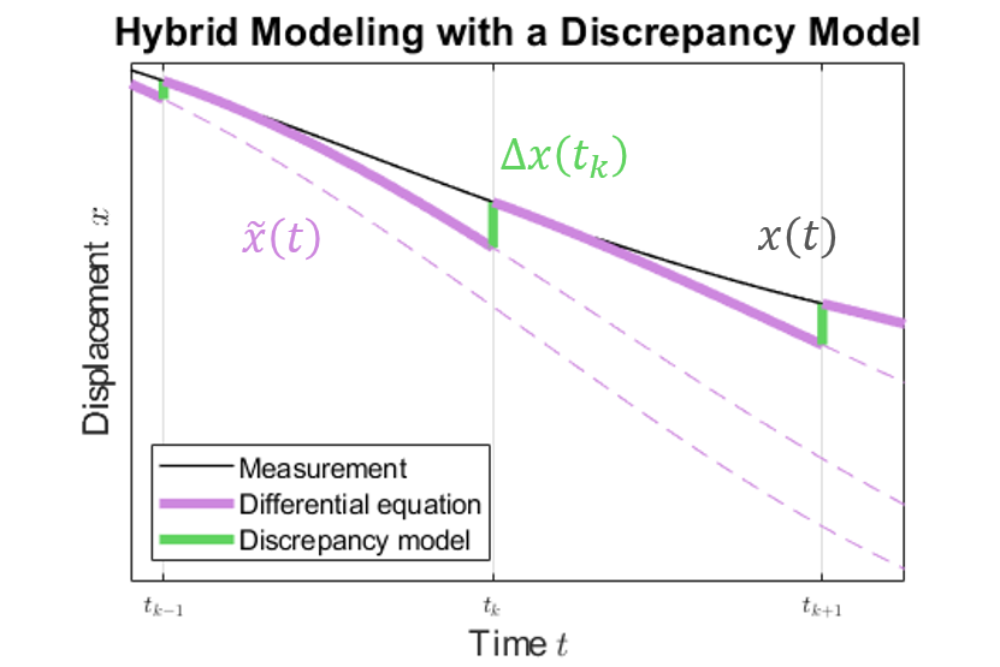
- White-box models (e.g. differential equations) with a high degree of physical knowledge are often too complex and/or too inaccurate
- Black-box models (generated e.g. by machine learning methods such as decision trees or neural networks) are often not explainable and cost-intensive (data collection)
Hybrid modeling as a combination of physics-based white-box models and data-driven black-box models, e.g. in the form of a discrepancy model
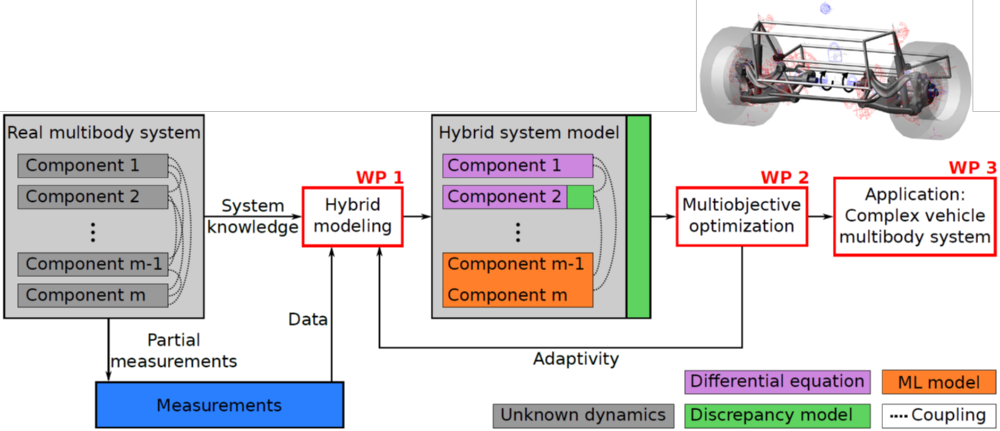
The hybrid, data-enhanced multiobjective optimization framework
Hybrid Modeling
Implementation and modularization of wheel suspension model in Neweul-M2

Hybrid modeling of components (e.g., rubber metal bushing)
- Improving efficiency through data-driven expansion of simple models
- Improving accuracy through data-driven expansion of complex models
- Comparing the dynamic stiffness of measurements and model


Hybrid modeling of systems (e.g., Four-Bar-Linkage)
- Discrete method
- Published in (Wohlleben et al., 2023) and (Wohlleben et al., 2024)
- Continuous method
- Published in (Wohlleben et al., 2024)



Multi-Objective Optimization
Development of surrogate-assisted optimizer Compromise.jl
- Design of a flexible API for heterogeneous problems
and hybrid surrogates - Support for non-linear, non-convex constraints
- Currently in review, preprint available (Berkemeier et. al., 2023)



Development of tools to compare algorithms in various languages (Julia, Python, Fortran/C, Matlab)
- E.g., Julia optimizer Compromise.jl can handle Python callbacks
- Collaboration to test optimizer on hydraulic turbine simulation
- Published in (Rentschler et. al., 2024)
- Successful improvement of approximate Pareto-optimal solutions
- Benchmarks of now Nonlinear Conjugate Gradient methods
- Preprint available, (Berkemeier et. al., 2024)

Investigation of global Pareto-Front approximation
- Combining evolutionary algorithms and global surrogates (ANNs or RBFs)
- Application: optimize “safety” and “comfort” in rear suspension simulation
- Preprint available, (Amakor et al., 2024)

How could other projects support our work?
- Experience with coupling FMD software and AI model execution capabilities (e.g., co-simulation, subroutines)
- Other interesting model classes and applications
How can we support other projects?
- Multicriteria optimization of dynamical systems
- Physical and hybrid modeling of dynamical systems
First Phase Publications
Payrebrune, K. de; Flasskamp, K.; Ströhla, T.; Sattel, T.; Bestle, D.; Röder, B.; Eberhard, P.; Peitz, S.; Stoffel, M.; Gulakala, R.; Borse, A.; Wohlleben, M.; Sextro, W.; Raff, M.; Remy, C. D.; Yadav, M.; Stender, M.; Delden, J. van; Lüddecke, T.; Langer, S. C.; Schultz, J.; Blech, C. (2024). The Impact of AI on Engineering Design Procedures for Dynamical Systems. URL: https://arxiv.org/abs/2412.12230, submitted on 20.11.2024 to Technische Mechanik.
Wohlleben, M.; Röder, B.; Ebel, H.; Muth, L.; Sextro, W.; Eberhard, P.: Hybrid modeling of multibody systems: Comparison of two discrepancy models for trajectory prediction. Proceedings in Applied Mathematics and Mechanics, e202400027, 2024. DOI: 10.1002/pamm.202400027
Wohlleben, M.; Muth, L.; Peitz, S.; Sextro, W.: Transferability of a discrepancy model for the dynamics of electromagnetic oscillating circuits. Proceedings in Applied Mathematics and Mechanics, 00, e202300039, 2023. DOI: 10.1002/pamm.202300039
Amakor, A.C.; Berkemeier, M.B.; Wohlleben, M.; Sextro, W.; Peitz, S.; Surrogate-assisted multi-objective design of complex multibody systems, 2024. DOI: 10.48550/arXiv.2412.14854.
Berkemeier, M.B.; Sonntag, K.; Peitz, S.; New Nonlinear Conjugate Gradient Methods with Guaranteed Descent for Multi-Objective Optimization, 2024. Optimization Online: 28824. Available: https://optimization-online.org/?p=28824
Rentschler, T., Berkemeier, M.B., Fraas, S., Tismer, A., Raj, R., Peitz, S., & Riedelbauch, S. (2024). Multi-criteria hydraulic turbine optimization using a genetic algorithm and trust-region postprocessing. Proceedings in Applied Mathematics and Mechanics, e202400126. https://doi.org/10.1002/pamm.202400126
Contact
Prof. Dr.-Ing. habil. Walter Sextro
Universität Paderborn
Pohlweg 47-49
33098 Paderborn
P1.3.31.1
Tel.: +49 5251 60-1801
Email: walter.sextro@upb.de
Jun.-Prof. Dr. Sebastian Peitz
Universität Paderborn
Pohlweg 51
33098 Paderborn
O4.213
Tel.: +49 5251 60-5021
Email: sebastian.peitz@upb.de
Manuel Bastian Berkemeier
Email: manuelbb@mail.uni-paderborn.de
Meike Wohlleben
Email: meike.wohlleben@uni-paderborn.de