Objective of the project
Robotic systems made entirely of soft material, without explicit joints or backbone structure, are compliant, adaptable and can deform severely, which makes them prone for wearable devices, domestic robots, medicine, assistance, legged robots and grasping. However, due to the highly elastic structure, primarily made of visco-elastic material with nonlinear characteristics, and their continuous deformation, the design faces new challenges in modeling and predicting the behavior of these systems.
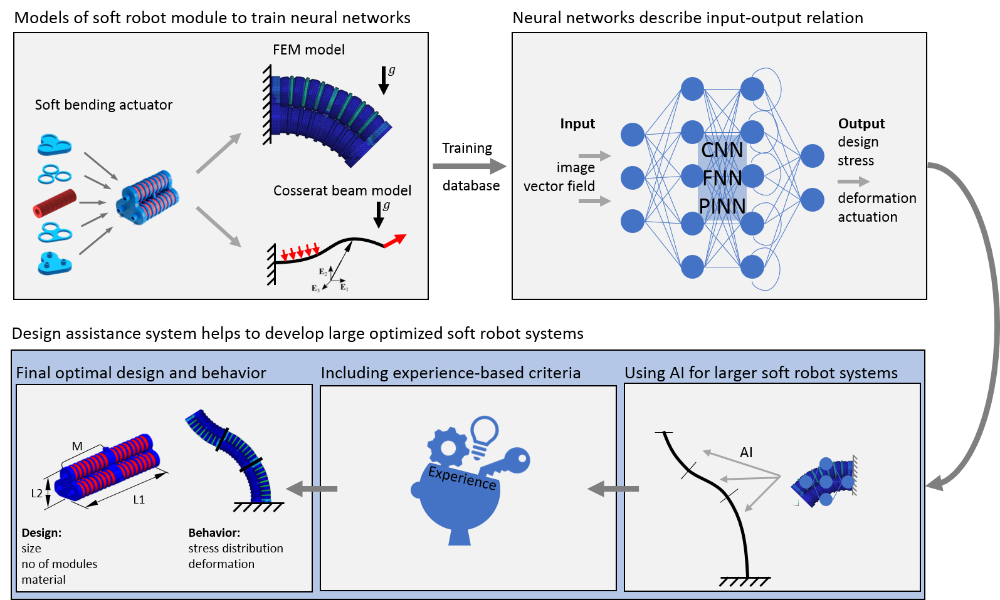
The aim of this project is to develop a design assistance system based on profound knowledge of the smallest design entity of a soft robotic system – in our case this is the pressurizable silicone cylinders of a universal soft bending actuator – to define the optimal design within the multi-parameter space in geometry, actuation and control.
The design assistance system will be based on underlying models and analysis of the forward kinematics and dynamics with help of a hierarchical approach of physical models and machine learning algorithms. By just defining the desired path that the universal bending actuator shall fulfill and the loads acting on the structure, the design assistance system shall determine the optimal dimension of all components, as well as the number of actuators connected in series and their actuation. Additional information, as the stress distribution in the bending actuator, the static and dynamic deformation and orientation, and the workspace shall be given as an output. Additional experience of the designer or applicator can be additionally integrated into the design process.
Preliminary work on soft robots
Design of an universal soft bending actuator
Inspired by numerous developed soft robots, we conducted an extensive study on various design aspects to develop a universal soft bending actuator that is easy to fabricate, simple to model, and broad in applicability.
Important design aspects studied are:
- the bending principle (bending air chambers vs. stretching/contracting air chambers),
- the dimensions: cross section, number and connection of the pressurisable air chambers,
- the number and reinforcement of air chambers.
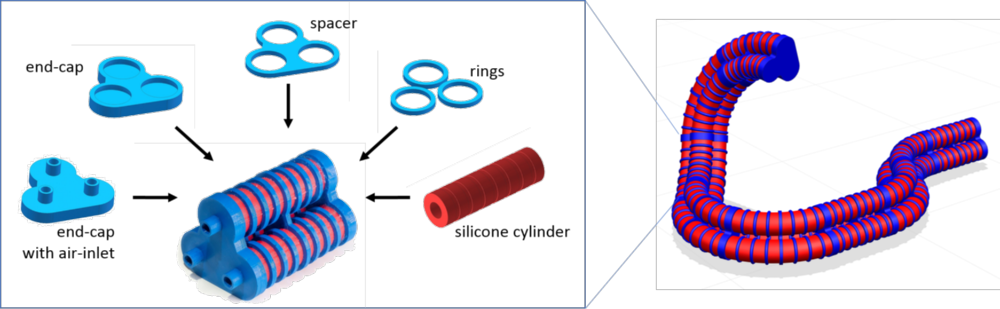
We found the design of three parallel aligned, cylindrical air chambers with ring-reinforcement, tied together with spacers, and closed by end caps is optimal for combined deformations (bending and stretching) and at the same time easy to manufacture. An advantage of our modular design is that each part can be easily adapted to realize specific functionality by either change the dimension or the material. Moreover, the modeling of this soft bending actuator is straightforward and numerical solutions exist for the characteristic behavior of a single pressurizable air chamber, from which the behavior of the entire module can be derived.
The adaptation of the basic design (dimensions, material, reinforcement) shall be realized with the design assistance system and the artificial neural network, which can select the best suited design from the large database obtained from numerical simulations.
How can we support other projects?
- Numerical work
- FEM model
- Beam model
- Experimental work
- Exchange of test equipment
- Providing prototypes
- Machine learning methods
- Exchange of NN
- Training our NNs with other data
How could other projects support our work?
- Data generation
- Including results from additional models
- Adding further aspects
- Machine learning algorithms
- Exchange of experiences
- Collaboration on NN
- Design assistance system
- Exchange of experiences
Contact
Prof. Dr.-Ing. Kristin de Payrebrune
Rheinland-Pfälzische Technische Universität Kaiserslautern-Landau
Geb. 44, Raum 427
Postfach 3049
Tel.: +49 631 2055100
Email: kristin.payrebrune@rptu.de
Leon Schindler
Email: leon.schindler@mv.rptu.de