The automotive industry is currently undergoing a major changes. While mobility concepts and drive technologies are changing, vehicle safety remains of utmost importance. Many of the new mobility concepts are only made possible by enhanced vehicle safety.
Currently, the field of vehicle safety systems can be divided into active and passive systems. Within this classification, active systems are designed to prevent an accident, while passive systems mitigate the consequences of an accident for the occupants. Each system has its own activation time, activation logic and principle of action.
Some of the various systems have been on the market for a very long time and are optimised for the load cases specified, for example, by Euro NCAP for approval or for achieving special safety ratings. Nevertheless, or precisely because the systems are optimised for the load cases, the occupant is often not optimally protected in a real crash.
In order to better protect the occupants in traffic, a holistic approach to vehicle safety is necessary, in which all available sensor data can be used to subsequently find an optimal and predictive safety strategy for the current occupant configuration and in the current driving scenario.
This is made possible by the ever-increasing development of improved sensor technology for the interior and exterior of the vehicle, the improved availability of data and the increasing connectivity between formerly separate systems.
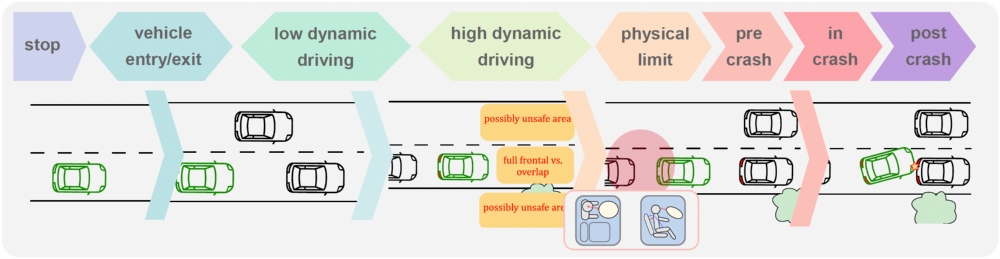
Figure 1 shows the driving phases of a car. From this, it can be seen which states are relevant for the safety of the occupants. In normal driving, for example, information about the driver's attentiveness can be used in combination with environmental information to warn the driver in a meaningful way. In the same way, when a brake assistant is activated, it is important to consider whether a rear-end collision is more dangerous for the current occupant position than an upcoming frontal collision. Here, for example, the head position and the restraint provided by the seat belt play a major role in the effectiveness of the airbag. To make a correct decision on how to optimally protect the occupant, a lot of information is important and a good model is needed to master this complexity.
The first step is a mathematical description of the driving situation in order to move vehicle safety from trigger-based activation of individual components and actuators to holistic and comprehensible safety decisions. The knowledge and models available in the automotive industry will be used to start an interdisciplinary modelling, simulation and optimisation.
In cooperation with ZF Friedrichshafen AG
Contact

Jörg Fehr
Prof. Dr.-Ing.
Florian Bechler
Dr.-Ing.(2020 - 2024)